



Aby dodatkowo nauczyć się czegoś nowego, postanowiłem w tym ćwiczeniu wykorzystać malutką płytkę Arduino Nano. Miał to być kolejny krok w zapoznawaniu się z różnymi płytkami Arduino. W artykule planowałem napisać coś w rodzaju: jak zwykle wszystkie przygotowania przebiegły bez problemów....
Niestety Arduino Nano już na wstępie spłatało mi przykrą niespodziankę!
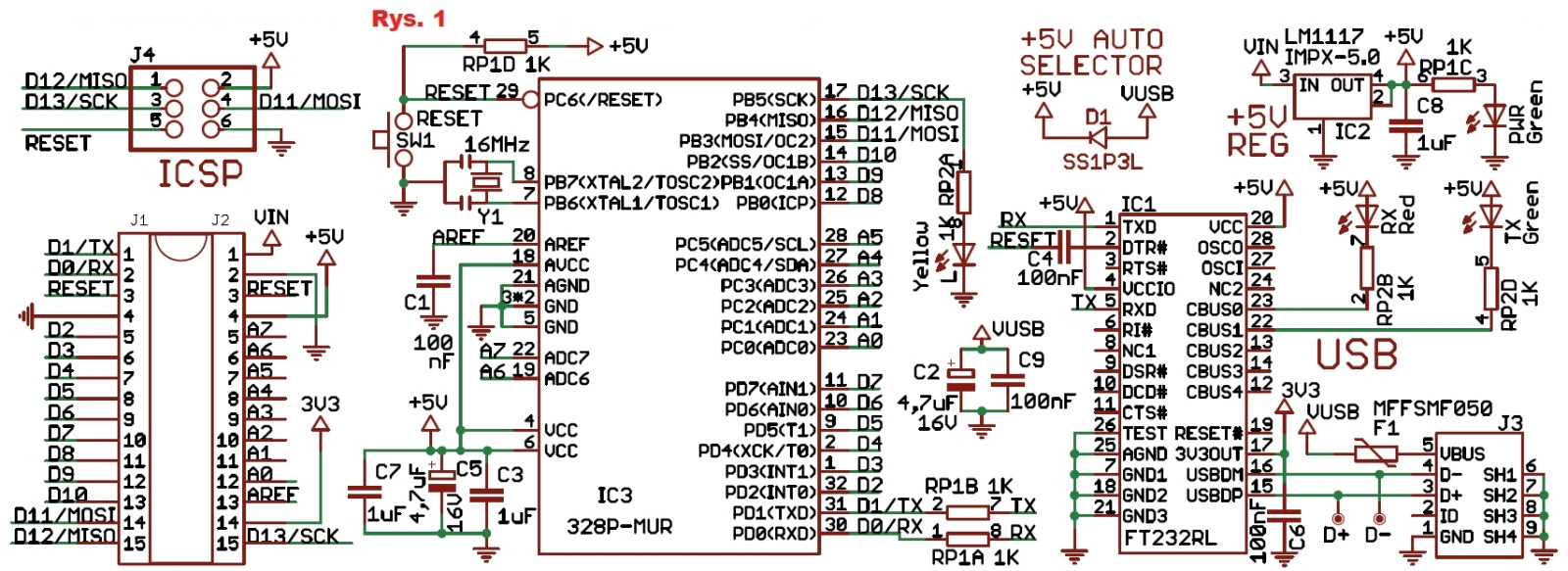
Wcześniej wykorzystywaliśmy już malutką płytkę Arduino Pro Mini, która nie ma złącza USB i do jej zaprogramowania potrzebny jest zewnętrzny konwerter USB-TTL. W przypadku Arduino Nano jest inaczej (praktycznie tak samo, jak z Arduino Uno): na płytce jest wbudowany układ interfejsu USB-TTL i do programowania wystarczy kabelek z wtyczką USB Mini. Jak pokazuje rysunek 1, schemat wersji Arduino Nano 3.3, w oryginalnej wersji funkcję konwertera – programatora pełni kostka FTDI FT232RL. W tanich chińskich klonach z powodzeniem zastępuje ją chiński układ CH340.
Należy zwrócić ...






















