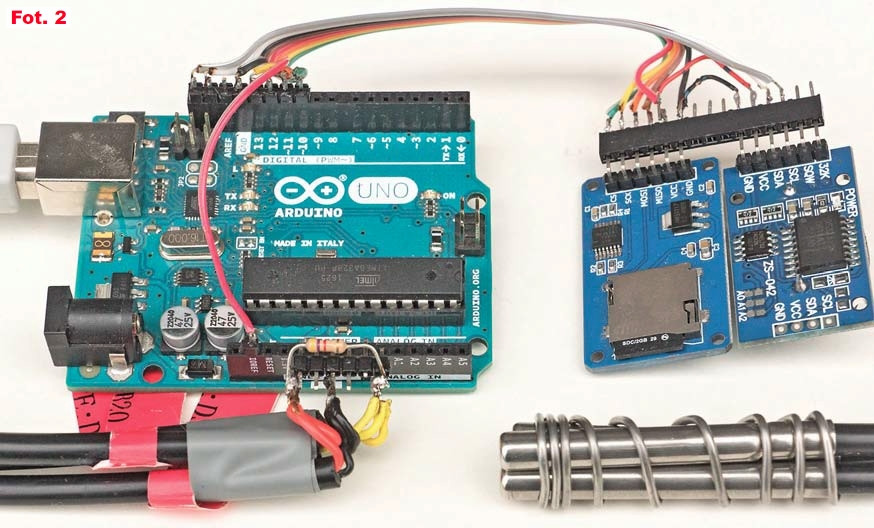
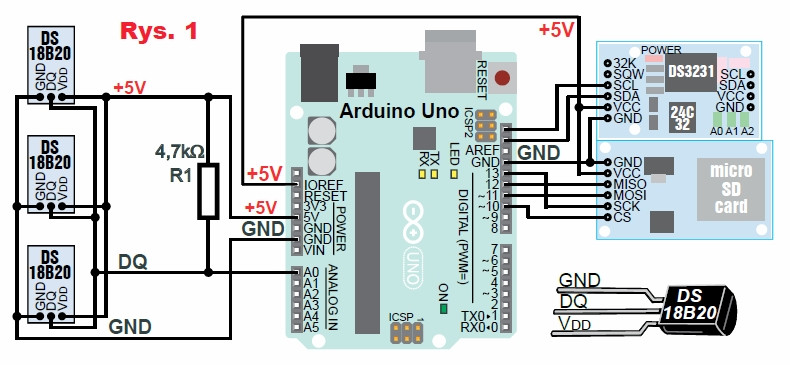
My zaczęliśmy od innych, moim zdaniem znacznie ciekawszych, zespolonych czujników temperatury i wilgotności, ale nie wypada w kursie Arduino pominąć łącza OneWire, a zapoznać się z nim najłatwiej właśnie na przykładzie popularnych czujników temperatury DS18B20. Ja do zestawu z poprzedniego ćwiczenia dodałem trzy takie czujniki, połączone „równolegle”. Końcówki DQ podłączone są do pinu A0 Arduino. Układ połączeń pokazany jest na rysunku 1, a fotografia 2 prezentuje mój model z trzema czujnikami owiniętymi drutem (lut cynowo-ołowiowy), by miały jednakową temperaturę.
Jeśli chodzi o stronę programową, to potrzebne będą dwie biblioteki. Jedna do obsługi łącza OneWire (1Wire), a druga, korzystająca z tej pierwszej, do obsługi czujników temperatury rodziny DS18xx (bo warto wiedzieć, że oprócz najpopularniejszej kostki DS18B20, dostępne są też inne kostki z tej rodziny, choćby starsza i gorsza DS18S20).