



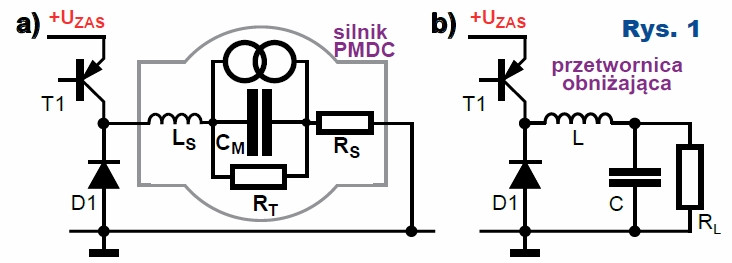
sJuż w piątej części cyklu dostrzegliśmy uderzające podobieństwo prostego sterownika silnika do przetwornicy obniżającej – rysunek 1.
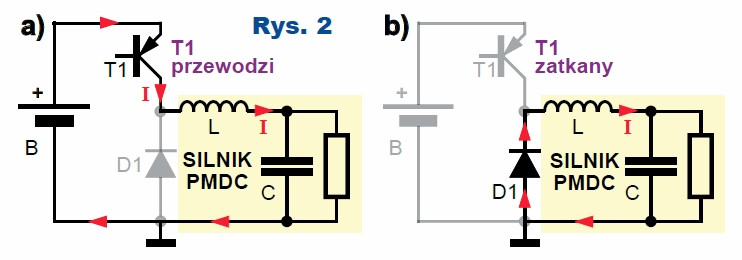
Gdy tranzystor przewodzi, prąd pobierany jest ze źródła zasilania według rysunku 2a. W chwilach przerw indukcyjność wymusza przepływ prądu w tym samym kierunku i dlatego niezbędna jest dioda – rysunek 2b.
Prąd, płynąc przez diodę, wywołuje na niej spadek napięcia, co oznacza straty mocy i grzanie się diody.
W przypadku małych silników o prądach pracy rzędu jednego, a nawet do kilku amperów nie jest to problemem, bo prąd przez diodę płynie tylko w krótkich chwilach, więc jego wartość skuteczna jest dużo mniejsza od prądu nominalnego silnika. Straty do 1 wata nie są problemem.
Jeżeli jednak chodzi o sterownik potężnego silnika o prądzie nominalnym kilkunastu czy kilkudziesięciu amperów, straty mocy w diodzie okażą się poważnym problemem, bo t...






















