



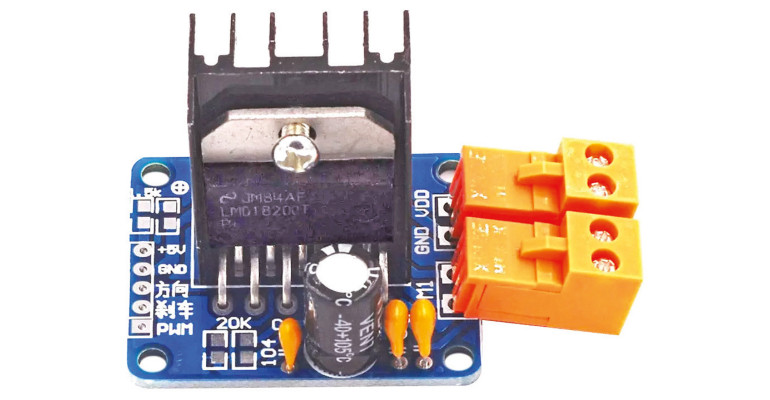
Przykładem może być kostka LMD18200, zawierająca mostek 55 V 3 A. Fotografia otwierająca pokazuje moduł z tym układem scalonym. Po lewej stronie są wejścia sterujące. Jedno oznaczone PWM, dwa inne jakimiś chińskimi znaczkami.
We wcześniej omawianych układach przy zmianie kierunku obrotów z reguły impulsy PWM podawane są na drugą stronę mostka, więc trzeba do tego wykorzystać dwie nóżki mikroprocesora, mające możliwość wytwarzania impulsów PWM. Tutaj jest inaczej.
Na schemacie blokowym układu LMD18200 wyróżniono żółtym kolorem trzy wejścia sterujące. Układ może być sterowany tak jak wcześniej omawiane kostki z dwoma równorzędnymi wejściami dla dwóch gałęzi mostka, ale tu możliwe są też bardziej interesujące sposoby. Nieprzypadkowo dwa wejścia oznaczone są PWM i DIR(ection). Na wejście PWM oczywiście podajemy impulsy o zmiennym wypełnieniu, natomiast stan wejścia DIR zgodnie z nazwa wyznacza kierunek obrotów – taki sposób sterowania wymaga użycia tylko jednego wyjścia mikroprocesora, mającego możliwość wytwarzania sygnału PWM. Taki sposób sterowania nazywany jest Sign/Magnitude. Wzrost współczynnika wypełnienia powoduje wzrost prędkości obrotowej w jednym albo drugim kierunku.






















