Czy takim archaicznym elementom warto poświęcać uwagę w czasach, gdy coraz częściej spotykamy się z silnikami krokowymi (stepper motors) i bezkomutatorowymi silnikami BLDC, które przy małych rozmiarach mają zaskakująco dużą moc?
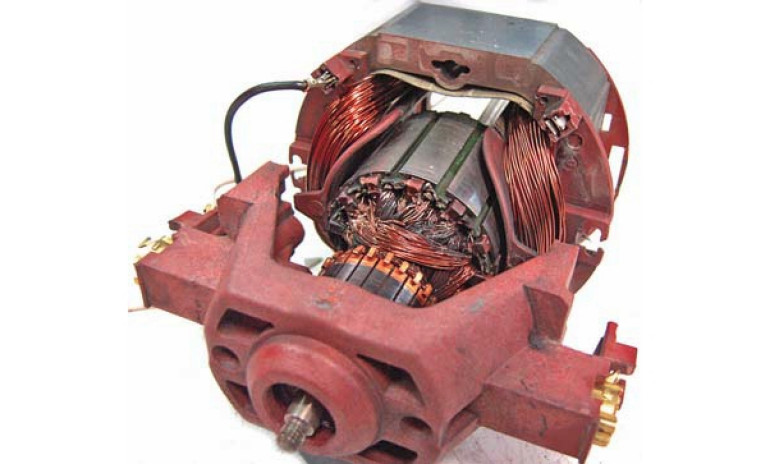
Warto, ponieważ poczciwe silniki komutatorowe prądu stałego, zwane też Brushed DC Motors, czyli silnikami szczotkowymi prądu stałego, zarówno małe, jak i większe, wciąż są ogromnie popularne. Obecnie coraz częściej sterowane są w sposób impulsowy, zwany PWM, a wtedy występują dodatkowe zjawiska i problemy. I właśnie problemy oraz błędne wyobrażenia związane ze sterowaniem impulsowym, zwłaszcza przy obrotach w obu kierunkach i hamowaniu, są wystarczającym powodem, żeby przypomnieć podstawy i omówić sposoby sterowania takimi silnikami.

Silniki elektryczne - omówienie
Maleńkie silniczki PMDC o średnicach od 4mm (fotografia 1) pracują w naszych telefonach jako wibratory. Potężne silniki prądu stałego pracowały i...