Model/schemat zastępczy silnika DC
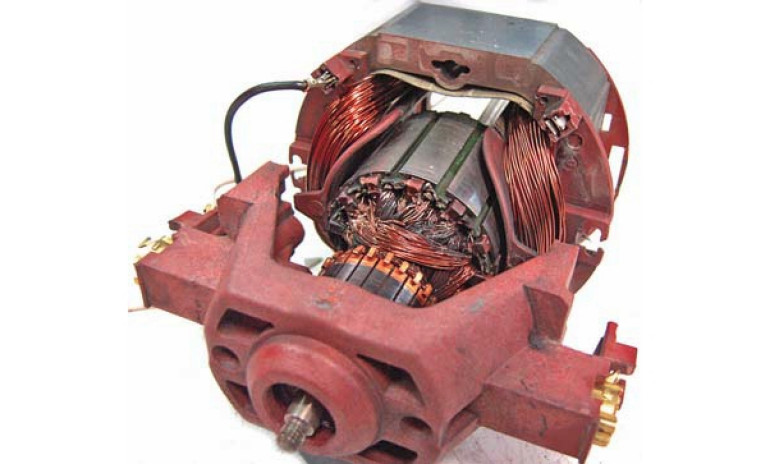
Wirnik ma uzwojenia, a te niewątpliwie mają jakąś indukcyjność L. Jak wiadomo, „indukcyjność przeciwstawia się zmianom prądu”, co ma kluczowe znaczenie przy sterowaniu impulsowym takiego silnika. Ponadto indukcyjność gromadzi energię, a potem tę zgromadzoną energię oddaje...
Wcześniej indukcyjność silnika pominęliśmy, bo omawialiśmy najprostszy sposób pracy przy „gładkim” prądzie stałym w warunkach ustalonych. Teraz niewątpliwie musimy wzbogacić schemat zastępczy silnika jak na rysunku 1.
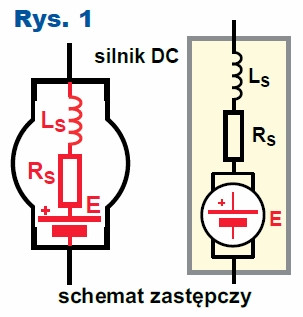
Oprócz takich schematów zastępczych w literaturze spotyka się też wersje bardziej rozbudowane, ilustrujące także kwestie mechaniczne. Przykład znajdziesz na rysunku 2. Mamy tu elementy elektrycznego schematu zastępczego z rysunku 1, a dodatkowo parametry mechaniczne, mianowicie informację o (momencie) bezwładności J, o stratach tarcia w powietrzu i łożyskach B oraz o prędkości obrotowej ω i momencie obciążenia silnik...