W zasadzie tak, ale w praktyce nie będzie tu tłumionych drgań sinusoidalnych. Pojemność CM jest ogromna. Porcja energii gromadzona w indukcyjności LS jest wielokrotnie mniejsza niż energia bezwładności wirnika, reprezentowana na schemacie przez energię zmagazynowaną w ogromnej pojemności „mechanicznej” CM. W związku z tym mechaniczna stała czasowa silnika, czyli w naszym modelu stała czasowa ładowania pojemności CM (τM = RS*CM), jest wielokrotnie większa od „elektrycznej” stałej czasowej ładowana/rozładowania indukcyjności (τE = LS/RS).
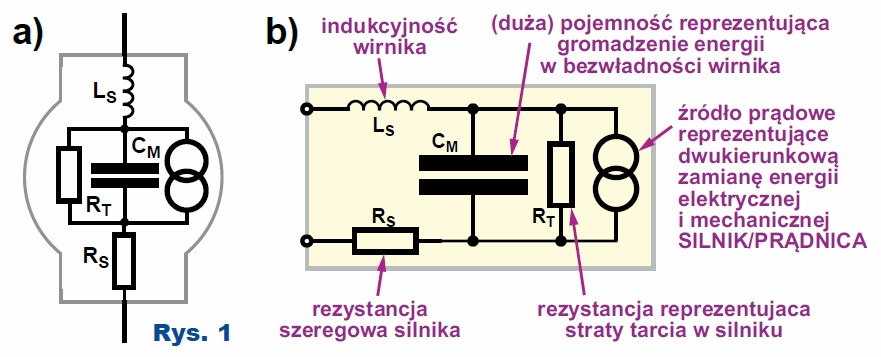
Rys.1 Uproszczony elektryczny schemat zastępczy silnika elektrycznego z magnesami trwałymi (PMDC)
Zawsze musimy też pamiętać, że:
- napięcie występujące na pojemności „mechanicznej” CM w każdym momencie ściśle odzwierciedla aktualną prędkość obrotową wirnika,
- siła, a ściślej moment obrotowy, wytwarzany przez silnik, jest wprost proporcjonalny do prądu pobieranego przez silnik.
Prędkość obrotowa praktycznie nie ma nic wspólnego z...