Opierając się na tym wcześniejszym projekcie, przechodzimy teraz do wprowadzenia techniki lidarów do skanowania otoczenia w środowisku ROS (Robot Operating System). Środowisko to tworzy mapę otoczenia w czasie rzeczywistym, używając jednocześnie lokalizowania i mapowania (SLAM). Skupiamy się przy tym na lokalizowaniu pojazdu na mapie bez polegania na danych GPS. System taki, będący w pojazdach autonomicznych częścią systemu ADAS, zwiększa dokładność lokalizacji i pomaga w planowaniu trasy nawet w sytuacjach, kiedy łączność z GPS się urywa, np. w tunelach lub w liniach metra. Znacząco wspomaga nawigację, wykorzystując metodę dead reckoning, która polega na obliczaniu bieżącej pozycji obiektu na podstawie pozycji wyliczonej poprzednio.
Na rysunku powyżej przedstawiono fragment pojazdu wyposażonego w lidar.
Połączenie wszystkich możliwości umożliwia systemowi ADAS sprawną nawigację i bezkolizyjne prowadzenie pojazdu dzięki skutecznemu omijaniu przeszkód.
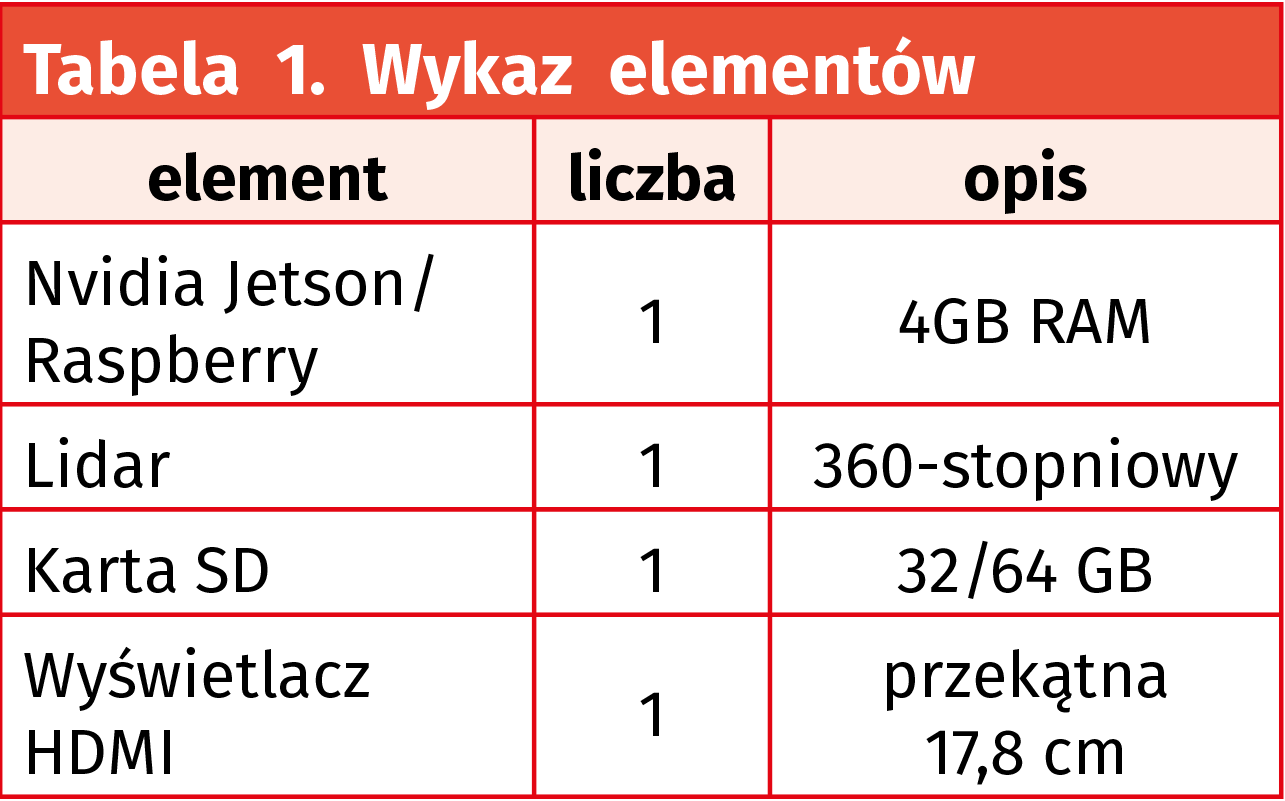
W tabeli 1 wymieniono elementy niezbędne do realizacji projektu. Jeśli Czytelnik już zbudował system ADAS w oparciu o wcześniejszy artykuł, zapewne ma te elementy.
Zanim zaczniemy zgłębiać projekt, musimy zapoznać się z trzema kluczowymi pojęciami: SLAM, Hector SLAM i dead reckoning:
- SLAM (jednoczesna lokalizacja i mapowanie) – podstawowe zagadnienie w robotyce i komputerowym przetwarzaniu obrazów. Cel jest taki, aby autonomiczny system (np. robot czy samochód) jednocześnie tworzył mapę swojego otoczenia oraz dokładnie, w czasie rzeczywistym, określał swoją pozycję na tej mapie.
- Hector SLAM – popularny i wydajny algorytm SLAM open source, przeznaczony dla robotów mobilnych. Podstawową cechą Hector SLAM jest to, że opiera się na cechach. Oznacza to, że w celu utworzenia mapy i oszacowania pozycji robota algorytm ten koncentruje się na wykrywaniu i śledzeniu cech otoczenia takich jak linie czy krawędzie.
- Dead reckoning – stanowi podstawową technikę nawigacji służącą do szacowania bieżącej pozycji poruszającego się obiektu w oparciu o jego poprzednią znaną pozycję oraz informacje o ruchu (prędkość, kurs i czas). Technika ta jest szeroko stosowana gdy dane z GPS są nieosiągalne. Metoda jest też znana pod nazwą „deduced reckoning” lub „DR” (po polsku „nawigacja zliczeniowa”, przypis redaktora).