
System wymaga zasilania 5 V/4 A. Można je uzyskać z samego pojazdu. Do celów testowych można zasilić zestaw deweloperski NVIDIA Jetson z zasilacza USB 5 V/2 A. Z opcjami zasilania można się zapoznać pod linkiem https://forums.developer.nvidia.com/t/power-supply-considerations-for-jetson-nano-developer-kit/71637
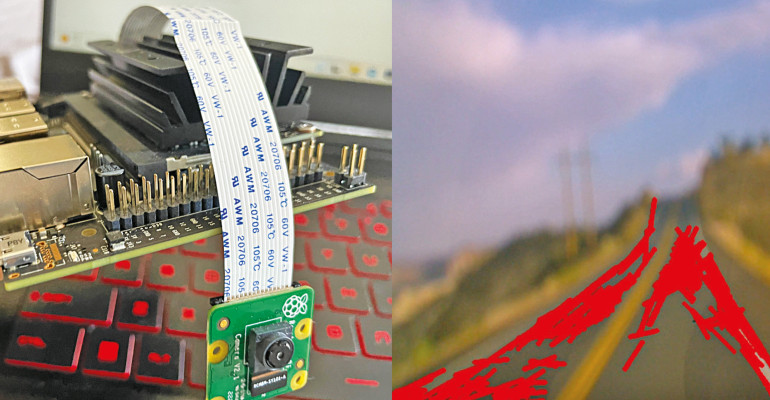
Do zestawu NVIDIA Jetson można podłączyć kamerę ze specjalizowanym interfejsem szeregowym (CSI) i kablem taśmowym lub dowolną kamerę USB. Wyświetlacz podłączamy przez HDMI i zasilamy go z USB. Informacje na temat podłączenia lidaru można znaleźć w pierwszej części artykułu.
Oprogramowanie
Należy przygotować zestaw NVIDIA Jetson z systemem operacyjnym i Pythonem, korzystając z instrukcji podanych w linku https://developer.nvidia.com/embedded/learn/get-started-jetson-nano-devkit.
W terminalu Linux instalujemy bibliotekę wideo OpenCV, niezbędną w systemie ADAS do przetwarzania obrazu, a następnie bibliotekę Pythona NumPy. Użyjemy następujących poleceń: