- Napięcie zasilania: 8…15 V DC.
- Maksymalny prąd obciążenia (z napięcia +12 V): 10 mA.
- Prąd podtrzymania zegara RTC (z napięcia BATT): 1 mA.
- Maksymalny prąd podświetlenia (z napięcia ILL+): 75 mA.
- Dokładność pomiaru temperatury: 1°C.
- Zakres pomiarowy temperatury zewnętrznej: -30…35°C.
- Zakres pomiarowy prędkości pojazdu: 0…255 km/godz.
- Zakres pomiarowy chwilowego zużycia paliwa: 0…99,9 l/100 km.
- Zakres pomiarowy średniego zużycia paliwa: 0…25,5 l/100 km.
- Zakres pomiarowy paliwa dostępnego w baku: 0…99,9 l.
- Zakres pomiarowy przejechanej odległości: 0…9999 km.
- Zakres pomiarowy dystansu do przejechania na dostępnym paliwie: 0…999 km.
- Zakresy regulacji parametrów konfiguracyjnych:
- Stałe wtryskiwaczy: 1…999 ml/min.
- Stała przetwornika drogi: 1…99 impulsów/obrót.
- Obwód opony: 50…255 cm.
- Liczba cylindrów: 2…8.
- Pojemności baków: 25…99 l.
- Przesunięcie belek informacyjnych: 0÷9 pikseli.
Komputer samochodowy multiTID został zbudowany z zastosowaniem mikrokontrolera Atmega644-PA, zegara czasu rzeczywistego z podtrzymaniem zasilania MCP7940N-I/SN oraz wyświetlacza TFT pełniącego rolę graficznego interfejsu użytkownika.
Mikrokontroler, jak to zwykle bywa, stanowi "serce". Jest taktowany za pomocą rezonatora kwarcowego 12,288 MHz dla zapewnienia dużej dokładności pomiaru czasu oraz prędkości ładowania obrazków stanowiących elementy graficznego interfejsu użytkownika. Oczywiście, lepiej byłoby zastosować maksymalną, dostępną częstotliwość taktowania mikrokontrolera tj. 20 MHz, jednak przy napięciu zasilania 3,3 V jest to wartość progowa, dla której deklarowana jest poprawna praca mikrokontrolera.
W celu realizacji założonej funkcjonalności urządzenia, w programie obsługi niniejszego sterownika, wykorzystano dwa sprzętowe układy czasowo-licznikowe znajdujące się "na pokładzie" mikrokontrolera oraz jedno przerwanie zewnętrzne. Sposób konfiguracji wspomnianych peryferiów oraz realizowaną przez nie funkcjonalność pokazano w tabeli 6. W aplikacji użyto także ostatniego dostępnego układu czasowo-licznikowego Timer2. Skonfigurowano go do pracy w trybie CTC, w którym generuje cykliczne przerwania (co 10 ms) wywołując obsługę klawiatury (przyciski MENU/<, OK/>). Dzięki zastosowaniu tego typu rozwiązania, program obsługi aplikacji urządzenia nie używa opóźnień, co zapewnia jego bezproblemową pracę oraz możliwość detekcji czasu naciśnięcia przycisku (krótki/długi/przytrzymanie itd.), dzięki czemu udało się poprawić ergonomię.
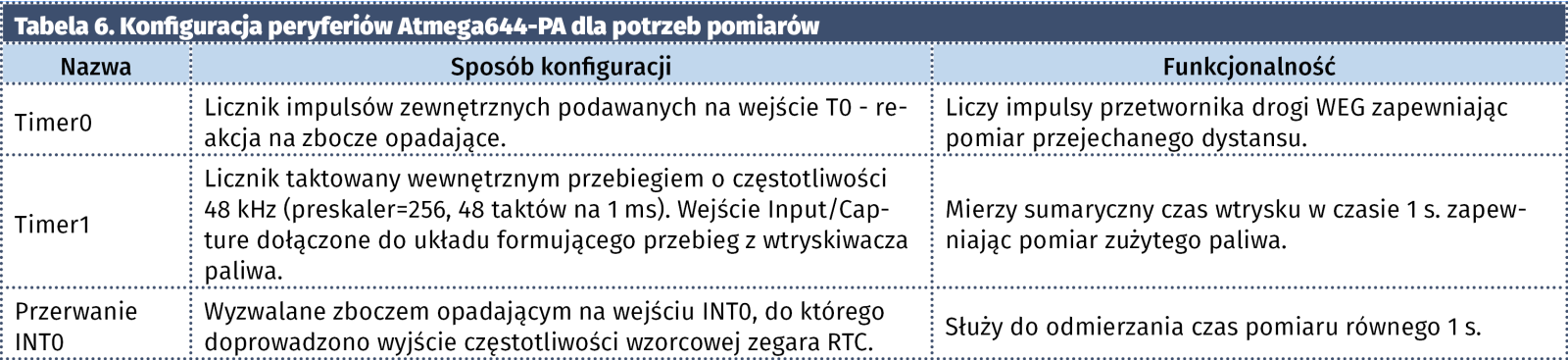
Jak opisano w tabeli 6, multiTID dokonuje w czasie każdej sekundy pomiaru sumarycznej liczby impulsów doprowadzanych na wejście T0 mikrokontrolera z przetwornika drogi pojazdu oraz pomiaru sumarycznego czasu wtrysków, których to sygnał jest doprowadzony na wejście ICP1 licznika Timer1. W celu realizacji drugiej z funkcjonalności zaprojektowano dwa kompletne, bezpieczne układy wejściowe formujące sygnały wtryskiwaczy paliwa (oddzielnie dla Pb i LPG) dla potrzeb wejściowych obwodów mikrokontrolera. Wybór wtryskiwacza paliwa, z którego impulsy podawane są na wejście ICP mikrokontrolera, jest realizowany poprzez scalony przełącznik NC7SB3157 (U5), dla którego sygnałem sterującym jest poziom logiczny na wyjściu PD7 mikrokontrolera. Jest on zmieniany w procedurze obsługi przerwania PCINT1, które jest wywoływane zmianą poziomu na wyprowadzeniu PB6 na skutek załączenia zaworu na reduktorze instalacji LPG (czyli zmiany paliwa zasilającego silnik na LPG, w tym "start" wtryskiwaczy gazu). To rozwiązanie pozwala na efektywną realizację funkcji automatycznej detekcji rodzaju paliwa i reakcję po stronie programu obsługi.