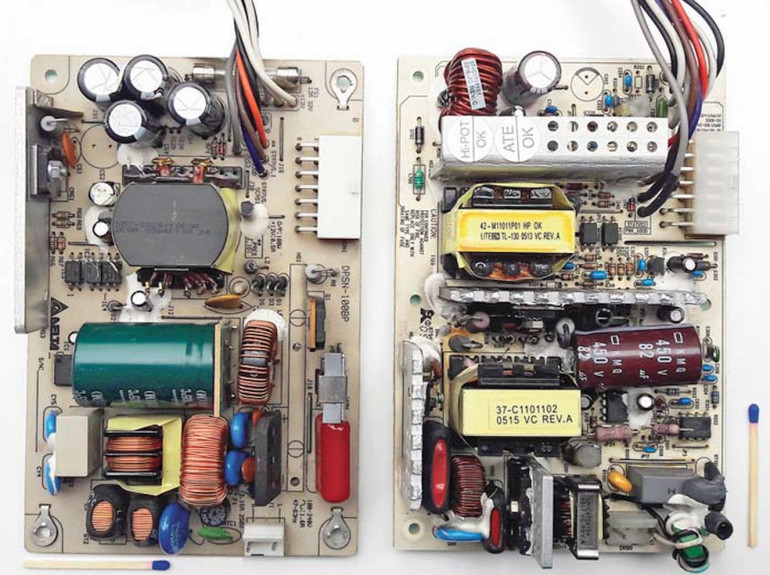
W kilkuczęściowym artykule z cyklu „Odkrywamy schematy” przyglądamy się rozwiązaniom praktycznym zasilaczy obu konfiguracji o identycznych kluczowych parametrach: 12V, 8,5A. Daje to moc około 100W, co według podręczników jest graniczną wartością, kiedy trudno jednoznacznie przesądzić o zaletach jednej konfiguracji nad drugą.
Przy wyższych mocach i/lub niskich napięciach wyjściowych wybierana jest konfiguracja forward. Przy niższych mocach i/lub mniejszych prądach wyjściowych (co jest jednoznaczne z wyższymi napięciami), a w szczególności gdy zasilacz ma wytwarzać wiele napięć, z reguły wybierana jest konfiguracja flyback. Dlaczego? Spróbujmy to przynajmniej częściowo zgłębić w artykule.
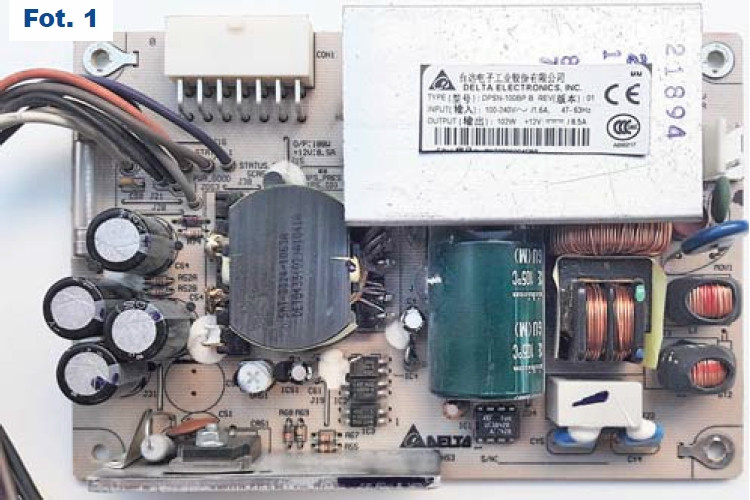
Jak widać na fotografii tytułowej, obie płytki zasilacza są tej samej wielkości, a pozostałe parametry, jak sprawność, line- i load regulation, także są podobne. Tak się dobrze składa, że oba zasilacze mają ten sam sterownik (układ scalony). Płytki poddane badaniom oznaczone są DPSN-100BP firmy Delta – flyback (fotografia 1) i PA-1101-1 firmy Liteon – forward (fotografia 2).

UC3842/3845 - dlaczego jest układem ever green?
Układ UC3842 (także z końcówką 3, 4 i 5, o różnicach dalej) to jeden z niewielu układów zasługujących na miano – ever green, podobnie jak np. timer 555 lub wzmacniacz operacyjny 741. UC3842 nie jest młody, a mimo to spotykamy go często i choćby z tego względu warto przyjrzeć mu się bliżej. Nie będziemy omawiać szczegółów budowy.
Jednak koniecznie trzeba przywołać jego istotne cechy. Sukces tej rodziny sterowników sprawił, że obecnie istnieje na rynku wiele układów scalonych pod innymi nazwami, w których rdzeniem jest właśnie 3842. Obudowane są one wieloma obwodami uszlachetniającymi, przede wszystkim obwodami zabezpieczeń, co sprawia, że przetwornica zawiera niewiele elementów dyskretnych, a liczba nóżek układu scalonego nie wzrosła. Tu należałoby przywołać bogatą rodzinę układów scalonych firmy ON-Semiconductor funkcjonującą pod oznaczeniami NCP1200 (12xx). Co zatem wyróżnia UC3842? Dominującą jego cechą jest elastyczność aplikacji.
Czym różnią się od siebie przetwornice forward i flyback?
Dla porządku jednak przypomnijmy zasadniczą różnicę między konfiguracjami forward i flyback. Forward to przetwornica przepustowa. Prąd płynie jednocześnie w uzwojeniu pierwotnym i wtórnym. Transformator nie magazynuje energii. Dla tego celu potrzebna jest oddzielna indukcyjność po stronie wtórnej zasilacza. Flyback nazywany jest przetwornicą dwutaktową. Można w niej bowiem wyróżnić dwa zasadnicze takty pracy. Takt magazynowania energii i takt jej przekazania do wyjścia.
Kiedy prąd płynie w uzwojeniu pierwotnym, diody po stronie wtórnej blokują możliwość przepływu prądu w uzwojeniu/ uzwojeniach wtórnych. Wyłączenie klucza powoduje odwrócenie napięć samoindukcji na wszystkich uzwojeniach i wtedy następuje faza przekazania energii do wyjścia. Ale to nie jest normalny transformator! Poprawniej należy go nazwać sprzężonymi magnetycznie cewkami.
Tak to wygląda w największym skrócie. Do szczegółów dojdziemy, porównując oscylogramy, które autor zdjął z dwu płytek badanych zasilaczy. W tym miejscu autor zaleca przerwę i powrót do cyklu artykułów poświęconych przetwornicom indukcyjnym autorstwa P. Piotra Góreckiego. W szczególności do części 12 i 13 (EdW 2017/11 i 2017/12) oraz do cz. 16, 17 i 18 (EdW 2018/04 , 2018/05 i 2018/06).
Najważniejsze cechy sterownika UC3842
A teraz wymienimy w skrócie istotne cechy sterownika UC3842 (warto zajrzeć do karty katalogowej): pracuje on ze stałą częstotliwością kluczowania, wyznaczoną przez wewnętrzny oscylator. Jest ona jednak zewnętrznie programowana wartością rezystora i kondensatora. W układzie scalonym zawarte jest skompensowane termicznie źródło napięcia odniesienia, wzmacniacz błędu, komparator PWM i wszystkie obwody niezbędne do pracy drivera przetwornicy w trybie current mode. Stopień wyjściowy może sterować zarówno tranzystorem bipolarnym, jak i MOSFET-em. Jest on wykonany jako stopień totem-pole ze zdolnościami prądowymi pozwalającymi na szybkie przeładowanie pojemności bramki nawet dużych MOSFET-ów.
Różnice między UC3842, 3843, 3844 i 3845 nie są istotne dla sposobu pracy sterownika i wykonanej na jego bazie przetwornicy. UC3842/3844 mają progi zabezpieczeń UVLO 10V i 16V, 3843 i 3845 odpowiednio 7,9V i 8,5V (w szczególności znacznie mniejszą histerezę napięcia zasilania). Z kolei 3842/3843 mogą pracować z wypełnieniem PWM bliskim 100%, a 3844 i 3845 mają ograniczenie PWM na poziomie 50%.
W tym miejscu warto zrobić kolejny przerywnik i wymienić istotne cechy trybu current mode, gdyż to jest cecha kluczowa dla 3842.
Jakie są różnice między trybami voltage mode i current mode?
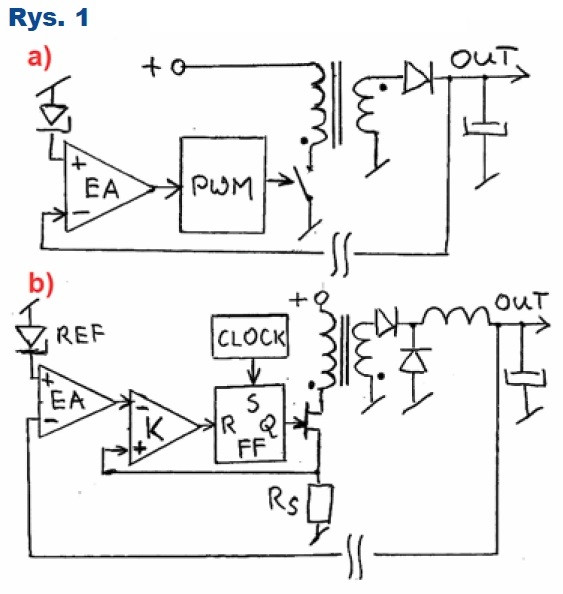
Oba regulują w oparciu o modulację PWM, czyli w sumie czas włączenia klucza. To cecha wspólna. A różnice? Porównanie obu trybów (idei pracy przetwornic) pokazuje rysunek 1a i b. Najkrócej można to opisać jednym zdaniem. W trybie napięciowym błąd (różnica między wartością zadaną napięcia wyjściowego zasilacza a jego wartością aktualną) bezpośrednio ma przełożenie na PWM pracy klucza tak, aby skasować (zmniejszyć) ten błąd.
Natomiast w trybie current mode wzmacniacz błędu nie kontroluje bezpośrednio komparatora PWM. Wyznacza on poziom, do którego pozwoli narosnąć prądowi klucza i indukcyjności. Współczynnik wypełnienia wyznacza tu wewnętrzna pętla prądowa. Skutek jest wprawdzie ten sam, lecz osiągnięty w inny sposób, a wpływ wzmacniacza błędu na czas włączenia klucza jest pośredni. Na rysunku 1 tryb voltage mode zobrazowano w postaci przetwornicy flyback, a current mode jako forward. Oczywiście te tryby pracy nie są przypisane do konfiguracji zasilacza.
Jakie są zalety trybu prądowego?
Należy się domyślać, że tryb prądowy ma jakieś zalety względem starszego i prostszego trybu napięciowego voltage mode. Tam jedna pętla, tu dwie pętle sprzężenia zwrotnego, jak mówimy w żargonie: feedbacku. Już z jedną pętlą mamy dość problemów. Jaka to zaleta?
Głębsza analiza ujawnia, że charakterystyka ujemnego sprzężenia zwrotnego upraszcza się. A ze sprzężeniem zwrotnym jest jeden odwieczny problem. Chodzi o to, aby układ pozostał stabilny oraz aby pasmo było jak najszersze, bo wtedy jest dobra dynamika, czyli szybka reakcja układu na zmiany obciążenia i/lub napięcia wejściowego.
Odkąd wymyślono ideę ujemnego sprzężenia zwrotnego (historia jest też ciekawa, bo idea była początkowo przyjęta, jakby ktoś chciał opatentować perpetuum mobile), właściwie nic się nie zmieniło. Ciągła walka z opóźnieniami, które mogą zamienić ujemne sprzężenie zwrotne w dodatnie. A wtedy układ zamieni się w oscylator/generator. A tego nie chcemy. Co więcej, chcemy, aby pętla reagowała szybko i nie tylko bez oscylacji, ale i bez tendencji do oscylacji, bez przeregulowań i tętnień.
Problem jest w tym miejscu tylko zasygnalizowany. A Czytelnik powinien teraz zapytać, jaka w takim razie jest zaleta, korzyść z prądowego trybu pracy? Odpowiedź nie będzie w pełni satysfakcjonująca, ale za to krótka: z charakterystyki zamkniętego układu regulacji wypada jeden biegun. A to już dużo i istotna korzyść.
Biegun zawsze można sobie wyobrażać jako człon RC w obwodzie zamkniętej pętli. A człon taki przy dużych częstotliwościach może wnieść opóźnienie fazy do 90°, a nawet na częstotliwości bieguna jest to niemało, bo 45 stopni. Między czystym sprzężeniem ujemnym a dodatnim dysponujemy całkowitym przesunięciem fazowym wszystkich obwodów pętli równym 180°, a margines fazy 30–40 stopni kątowych jest pożądany lub wręcz wymagany.
Dla porządku należy dopowiedzieć jeszcze jedną rzecz. Tryb prądowy, w jakim pracuje sterownik przetwornicy 3842, to tzw. peak current mode. Reaguje na szczytowy prąd, czyli maksymalną wartość prądu w indukcyjności. Bardziej pożądana byłaby kontrola wartości średniej, nie maksymalnej. Dlatego tryb peak current mode jest uważany za ułomny względem average current mode. Wartość szczytowa jest bliższa średniej, gdy tętnienia, czyli zakres zmian prądu w indukcyjności jest mniejszy. A tak jest wtedy, gdy układ pracuje w trybie przewodzenia ciągłego CCM.
W trybie nieciągłym DCM (Discontinuous Conduction Mode) przez część czasu prąd indukcyjności spada do zera. W głębokim trybie DCM różnica wartości szczytowej względem średniej jest znaczna. Jednak sam fakt pracy przetwornicy w DCM lub CCM także rzutuje na charakterystykę zamkniętej pętli regulacji. CCM wnosi do charakterystyki dodatkowe zero!
Dodatkowe zero… to chyba dobrze? Zero jest zwykle zbawienne. Nie lubimy biegunów! A zerem można skasować biegun! Tak, lecz to nie jest „normalne zero”. Pojawia się w charakterystyce tzw. RHP-zero (Right-Half-Plane Zero). To zero leżące na prawej półpłaszczyźnie (zespolonej). Zero, które nie wyprzedza, lecz opóźnia fazę. Zero, które nie przesądza o niestabilności tak jak bieguny, lecz RHP zero jest, oględnie mówiąc – kłopotliwe.
Wystarczy. Nie rozwijamy tych problemów, ale należy mieć świadomość ich istnienia. Z całą pewnością doczekamy się na łamach EdW opracowań wyjaśniających te zagadnienia. Problem w tym, że trudno to zrobić, nie wspomagając się skomplikowanym aparatem matematycznym. A żeby nie pozostawić luk w rozumowaniu, należałoby wyjaśnić, co to są zera i bieguny. A jeśli już powiemy, że to miejsca zerowe wielomianów, powstanie kolejna luka do wyjaśnienia. Skąd wzięło się równanie algebraiczne, jeśli układ regulacji i jego pętlę należy opisać równaniem różniczkowym.
Widać, że jeśli nie sięgniemy do sedna sprawy, to pojawi się więcej wątpliwości aniżeli wyjaśnienia. W tym miejscu autor apelowałby do Czytelników: czy należy na łamach EdW omawiać te trudne problemy? A jeśli tak, to nikt nie zrobi tego lepiej niż Piotr Górecki. I to zdanie należy traktować jako pierwszy głos (autora artykułu) – jestem za!
Więcej zalet trybu current mode
Wracamy do głównego tematu. Mieliśmy wymienić zalety trybu current mode, w którym pracują obie porównywane przetwornice. Wymieniliśmy jedną, i jak się okazuje, wątpliwą! Oto kolejne:
- W układach regulacji znana jest technika wspomagania sprzężenia zwrotnego poprzez tzw. feed-forward. Kojarzy się poprawnie: pierwszy reguluje – do tyłu, drugi – do przodu. A tu… feed-forward od napięcia wejściowego – jak znalazł! O co chodzi?
Zasilacz napięcia stałego z pętlą regulacji ma reagować na wszystkie czynniki, mogące wpłynąć na wartość tego napięcia. W szczególności na prąd obciążenia i napięcie wejściowe. Wartość napięcia wyjściowego zasilacza wyznaczona jest dwoma opornikami i jakimś napięciem odniesienia (w najprostszym przypadku – diody Zenera).
Lecz feed-forward jest bardzo pożądany jako taki sprytny, niejako wyprzedzający sposób kompensacji czynnika zakłócającego, by układ nie musiał czekać, aż zareaguje pętla sprzężenia zwrotnego. Kiedy zmieni się napięcie wyjściowe UWY, powstanie błąd, który z kolei wymusi zmianę współczynnika PWM i powrót do zadanej wartości napięcia wyjściowego. Ale spójrzmy, co się dzieje, gdy skokowej zmianie ulegnie napięcie wejściowe przetwornicy. Przy wyższym UWE zapewne będzie potrzebny krótszy czas włączenia klucza, mniejsza wartość współczynnika PWM.
Sprzężenie zwrotne to załatwi. Jeśli jednak układ pracuje tak, jak pokazano na rysunku 1b, to wyższa wartość UWE natychmiast spowoduje większą stromość narostu prądu w indukcyjności. Skoro wewnętrzna pętla reaguje na szczytową wartość tego prądu, zostanie ona osiągnięta w krótszym czasie, bez potrzeby reakcji głównej pętli zewnętrznej. I tak cecha bardzo pożądana zostaje osiągnięta za darmo: układ pracujący w trybie current mode będzie miał lepszy współczynnik line-regulation aniżeli zasilacz typu voltage mode. - Kolejną zaletą układu pracującego wg idei current mode jest prosta implementacja ograniczenia prądowego klucza reagującego w pojedynczym cyklu kluczowania. Wystarczy od góry ograniczyć napięcie wzmacniacza błędu pętli zewnętrznej. Pewne ograniczenie prądowe tego typu pozwala w szczególności na projekt bez zapasu parametrów transformatora przetwornicy.
- Kolejna zaleta trybu prądowego jest mniej oczywista. Przy gwałtownych i dużych zmianach obciążenia zasilacza nie pomoże nawet stosunkowo szybka pętla regulacji. O przystosowaniu się układu do nowych warunków pracy decyduje slew rate prądu w indukcyjności, a wzmacniacz błędu się... chwilowo nasyca.
Problem jest łatwiejszy do okiełznania w konfiguracji current mode. Na tym nie koniec. W zasilaczach niskich napięć i bardzo dużych prądów stosuje się obwody pracujące równolegle. W konfiguracji current mode jest to możliwe, w konfiguracji napięciowej – co najmniej bardzo trudne do osiągnięcia.
To wszystko sprawia, że tryb voltage mode spotykamy przede wszystkim w rozwiązaniach bardzo prostych i tanich. Większość zasilaczy pracuje w trybie current mode. Albo też, dodajmy dla porządku – budowane są jako przetwornice rezonansowe. Ale to zupełnie inna bajka.
Wady układu w trybie current mode
Jeżeli wymieniamy zalety, to należy postępować uczciwie i powiedzieć też o wadach lub co najmniej konsekwencjach, a rozbudowa układu nie jest jedyną. Okazuje się, że układowi pracującemu w trybie current mode ze współczynnikiem wypełnienia powyżej 50% grozi niestabilność! Tak, ale jest to specyficzny typ niestabilności (tzw. subharmonic oscillation i podkreślmy, dotyczy wewnętrznej pętli prądowej), na którą znaleziono proste lekarstwo.
W drugiej części artykułu będziemy przyglądać się już konketnemu rozwiązaniu zasilaczy