
Normalnie sterownik jest używany w trybie automatycznym, ale oprócz tego może też pracować w trybie ręcznym. Wówczas każdy częściowy obrót statywu następuje dopiero po przyciśnięciu przycisku. Dzięki temu można użyć aparatu, który nie ma możliwości wyzwalania zewnętrznego.
Budowa statywu
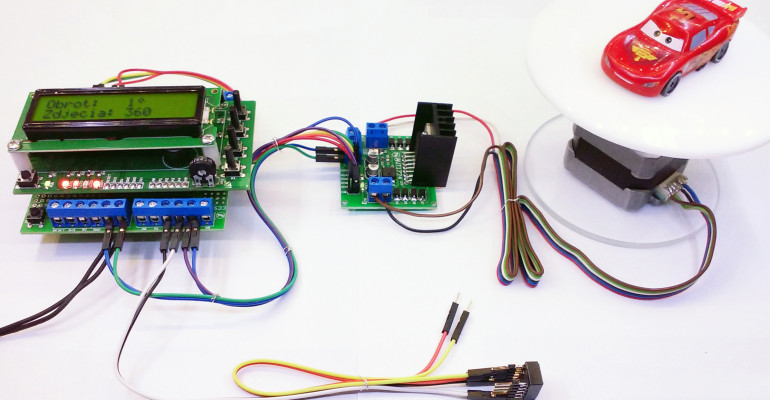
Statyw jest zbudowany z silnika krokowego z przytwierdzoną podstawą oraz dysku, przytwierdzonego centrycznie do osi silnika.
Sterowanie silnikiem krokowym
W prototypie zastosowano silnik krokowy, który ma skok o 1,8°, a więc pełny obrót wykonuje po 200 krokach. W czasie prób okazało się, że jest to zbyt dużo. Po pierwsze, taka rozdzielczość nie pozwalała na ustawienie dokładnego kąta obrotu, a po drugie, mechanizm drżał, a fotografowany model przesuwał się. Aby zniwelować te wady należało zastosować sterowanie mikrokrokowe. Polega ono na tym, że każdy podstawowy skok osi silnika jest dzielony na kilka kroków pośrednich. Efekt taki uzyskuje się sterując cewkami silnika ze stopniowaniem mocy za pomocą PWM.
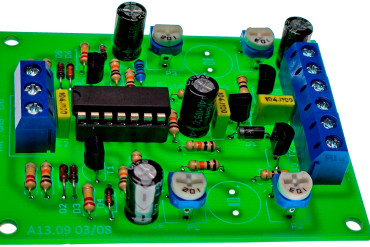
Stopień mocy dla silnika stanowi moduł AVT1724 zbudowany w oparciu o driver L298. Oprócz czterech sygnałów sterujących użyto sygnałów aktywujących (załączających) stopień mocy: ENA i ENB. Dzięki temu, gdy sterownik nie pracuje, możliwe jest swobodne obracanie dyskiem statywu.
Budowa
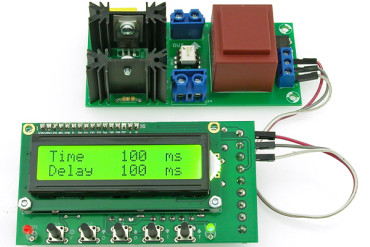
Jako interfejs pracuje moduł AVT1615, który ma wyświetlacz LCD i cztery przyciski. Dla ułatwienia wykonania połączeń zastosowano moduł AVT1633 – płytka ze złączami typu ARK dołączonymi do wyprowadzeń Arduino. Moduły połączono w formie „kanapki” Do wyzwalania spustu aparatu służy miniaturowy przekaźnik typu AZ850-5V, który w odpowiednim momencie na chwilę zwiera styki.
Obsługa
Obsługa urządzenia jest nieskomplikowana. Przyciskiem „S4” zmienia się kolejne parametry pracy, są to:
- „Obrot”. Definiuje kąt każdego kroku. Do wyboru są liczby, przez które można podzielić 360 stopni z wynikiem całkowitym. W drugiej linii wyświetlacza jest pokazywana liczba fotografii dla pełnego obrotu i danego kąta.
- „Kierunek”. Kierunek obrotu. Do wyboru „w lewo” lub „w prawo”.
- „Przerwa” – określa jak długo sterownik odczeka od momentu zatrzymania statywu w nowym położeniu do momentu wyzwolenia spustu aparatu. Jedynka to ok 0,5 s.
- „Szybkosc”. Określa prędkość obrotową silnika.
- „Kr/Obr” – należy ustawić liczbę kroków do pełnego obrotu dla danego typu silnika.
- „Automatycznie”/„Manualnie”. Przy pracy automatycznej, po osiągnięciu nowego położenia i odczekaniu ustawionego czasu następuje wyzwolenie spustu (kliknięcie przekaźnika) i po chwili statyw przesuwa się do kolejnego położenia i tak dalej, aż do pełnego obrotu. Przy pracy sterowanej ręcznie sterownik rozpocznie przesuwanie statywu do nowego położenia dopiero po przyciśnięciu przycisku S1.
Wartości parametrów można zmienić za pomocą przycisków S2 i S3. Przycisk S1 służy do uruchomienia procesu fotografowania oraz do sterowania trybem manualnym. Program został napisany w Atmel Studio 6.2. Jego źródło oraz przykładowe fotografie wykonane za pomocą sterownika dostępne są w materiałach dodatkowych.