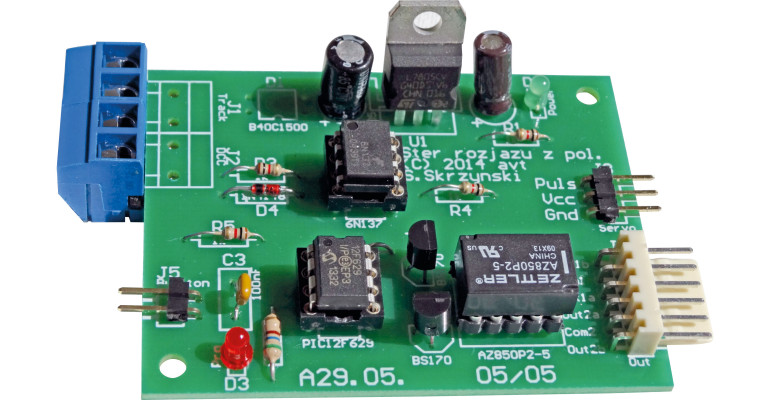

Projekt sterownika zaczerpnięto ze strony http://usuaris.tinet.org/fmco. Wprowadzono niewielkie zmiany: dodano diodę informującą o włączonym napięciu zasilającym, zmieniono rodzaj tranzystorów sterujących przekaźnikiem, zmieniono mikrokontroler z SMD na DIP oraz przystosowano płytkę do obudowy Z-70U.
Budowa i zasadza działania
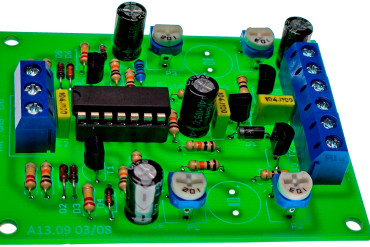
Napięcie zasilające, które może pochodzić z torowiska lub lepiej z osobnego zasilacza przeznaczonego do zasilania akcesoriów dodatkowych, jest prostowane za pomocą mostka diodowego D1, a następnie stabilizowane przez stabilizator U1.
Jeśli napięcie zasilające będzie przekraczało 12 V, konieczne może się okazać zamontowanie radiatora (typowy serwomechanizm o standardowej wielkości pobiera podczas pracy prąd o natężeniu ok. 160 mA, co może wywołać duże straty mocy na stabilizatorze). Dane DCC doprowadzone do złącza J2 po przejściu przez transoptor trafiają do mikrokontrolera, który je dekoduje. Jeśli rozkaz dotyczy sterownika rozjazdu, to serwomechanizm dołączony do wtyku J3 jest odpowiednio sterowany. Oprócz tego może zmienić się położenie przekaźnika bistabilnego sterowanego tranzystorami T1 i T2. Dzięki użyciu tranzystorów MOS nie ma konieczności stosowania rezystorów ograniczających prąd sterujący oraz diod tłumiących przepięcia powstające w chwili wyłączenia przekaźnika. Przekaźnik bistabilny do przełączenia styków potrzebuje krótkiego impulsu, dzięki czemu prąd jest pobierany tylko przez kilkadziesiąt milisekund, co przekłada się na mniejsze zużycie energii przez sterownik. Do złącza J5 można dołączyć przycisk, którym można zmieniać ręcznie położenie rozjazdu. Przycisk ten służy także do konfigurowania sterownika.