Metodyka pomiarów i zastosowane układy
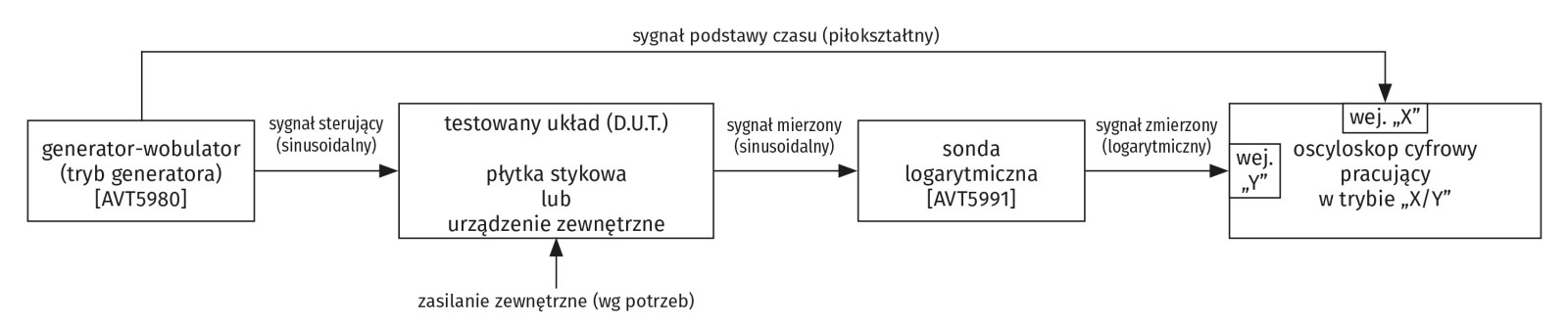
Jak wspomniano we wstępie do artykułu, w przeprowadzonych testach jako źródło sygnału pomiarowego zastosowano generator-wobulator z modułem DDS (AVT5980, EP 4...6/2023), który – w zależności od partykularnych potrzeb i wymaganej dokładności pomiarów – pracował albo jako generator przestrajany ręcznie, albo w trybie wobulatora z przemiataniem automatycznym, tj. liniowym w wybranym zakresie częstotliwości. W pierwszym przypadku układ pomiarowy wyglądał tak, jak na schemacie ideowym z rysunku 1 i był stosowany wtedy, gdy wymagane tempo przestrajania wobulatora było zbyt małe w stosunku do możliwości tego przyrządu.

Wówczas rezultaty pomiarów były odczytywane ręcznie i wprowadzane do tabel, na podstawie których powstawały stosowne wykresy. Natomiast w przypadku drugim zastosowano układ z rysunku 2, w którym charakterystyka częstotliwościowa była pobierana wprost z ekranu oscyloskopu pracującego w trybie „X/Y”.
Do każdego z rozpatrywanych układów wykonano symulacje komputerowe za pomocą popularnego i sprawdzonego oprogramowania LTSpice dystrybuowanego przez firmę Linear Technologies (LT).
Symulacje te miały przede wszystkim dwa cele. Pierwszym było umożliwienie oceny tego, czy zaprojektowany filtr – przynajmniej teoretycznie – spełnia oczekiwania postawione przez jego konstruktora. Drugim celem była ocena tego, czy i w jakim stopniu badany prototyp jest zgodny ze swoim teoretycznym pierwowzorem. Takie weryfikacje pozwalają również wyrobić sobie wstępny pogląd na problematykę wrażliwości różnych topologii filtrów na rozrzuty wartości zastosowanych w nich elementów i – tym samym – na zagrożenia jakościowe związane z występowaniem tego zjawiska.
Zastosowany w pomiarach generator-wobulator AVT5980 miał impedancję wyjściową zbliżoną do Rgen=50 Ω. Impedancja wejściowa używanego oscyloskopu wynosiła Rosc=1 MΩ, zaś w przypadku zastosowanej sondy logarytmicznej AVT5991 wynosiła odpowiednio: Rson=1 kΩ @ Att=0 dB, Rson=10 kΩ @ Att=–20 dB oraz Rson=100 kΩ @ Att=–40 dB – w zależności od nastawionego tłumienia wstępnego na wejściu sondy. Podane powyżej wartości impedancji wejściowych zostały oczywiście uwzględnione przy doborze parametrów mierzonych układów – tak aby wpływ na poprawność ich pracy oraz uzyskane rezultaty pomiarów był pomijalnie mały.
Filtry dolnoprzepustowe (LPF) m.cz.
Najprostszym przykładem dolnoprzepustowego filtru m.cz. jest jednoczłonowy filtr RC.
Schemat powstał w edytorze graficznym schematów programu LTSpice i stanowił wsad źródłowy do wykonania analizy (symulacji) badanego układu liniowego w dziedzinie częstotliwości.
Obliczenia wykonano w zakresie Fgen=1 Hz…10 kHz. Przy przyjętych wartościach elementów R=5,1 kΩ oraz C=10 nF uzyskano teoretyczną górną częstotliwość graniczną filtru Fg=3,12 kHz przy tłumieniu równym –3 dB. Wartość Fg różni się nieznacznie od wartości uzyskanej w wyniku przeprowadzonej symulacji na skutek wpływu rezystancji wewnętrznej generatora-wobulatora Rgen równej około 50 Ω.
Dla ułatwienia analizy danych wejściowych, na które nałożyły się też pewne niewielkie błędy pomiarowe, do wykresu dodano wygładzoną linię trendu (w kolorze czerwonym). Z analizy porównawczej obu charakterystyk wynika, że obie (zasymulowana oraz pomierzona oscyloskopem) są dobrze zgodne ze sobą, a niewielkie rozbieżności mogą wynikać (poza błędami pomiarów) z tolerancji wartości wykorzystanych elementów RC, która we wszystkich przypadkach była znacznie lepsza (mniejsza) od 5%, co zweryfikowano pomiarowo multimetrem o odpowiednio wysokiej dokładności.
Ciekawszym przykładem nieco tylko skuteczniejszego od powyżej omówionego dolnoprzepustowego filtru m.cz. (z uwagi na drabinkową strukturę – jednak bez wtórników-separatorów pomiędzy poszczególnymi członami RC) trójczłonowy łańcuchowy filtr RC.
Schemat tego filtru tym razem także powstał w edytorze graficznym programu LTSpice i posłużył za wsad do wykonania symulacji w dziedzinie częstotliwości badanego układu liniowego. Obliczenia wykonano w zakresie Fgen=1 Hz..100 kHz. Dla przyjętych wartości elementów R=R1=R2=R3=5,1 kΩ oraz C=C1=C2=C3=2,2 nF uzyskano teoretyczną częstotliwość quasi-rezonansową filtru Fqr=34,75 kHz. Natomiast jego górna częstotliwość graniczna (odczytana z wykresu przy tłumieniu bliskim –3 dB) wyniosła około Fg=2,74 kHz.
Warto podkreślić, że o ile własności tłumiennościowe tego filtru nie są istotnie atrakcyjniejsze w porównaniu do osiągów prostego, jednoczłonowego filtru RC, o tyle ciekawy jest fakt, że przy częstotliwości quasi-rezonansowej wprowadza on do przetwarzanego sygnału przesunięcie fazowe równe 180°, co predestynuje go do roli selektywnego przesuwnika fazowego w bardzo prostych generatorach sygnałowych z ujemnym sprzężeniem zwrotnym.
W tym przypadku również, celem ułatwienia analizy danych wejściowych obarczonych niewielkimi błędami pomiarowymi, do wykresu dodano wygładzoną linię trendu w kolorze czerwonym. Analiza porównawcza obu charakterystyk (zasymulowanej oraz zmierzonej oscyloskopem) wskazuje na ich zadowalającą zgodność, a nieznaczne różnice mogą wynikać z błędów pomiarów oraz z tolerancji wartości zastosowanych elementów RC, która we wszystkich przypadkach była znacznie lepsza (niższa) od 5%, co także poddano weryfikacji pomiarowej multimetrem o odpowiednio dużej dokładności.