




GŇā√≥wne cechy protokoŇāu I¬≤C
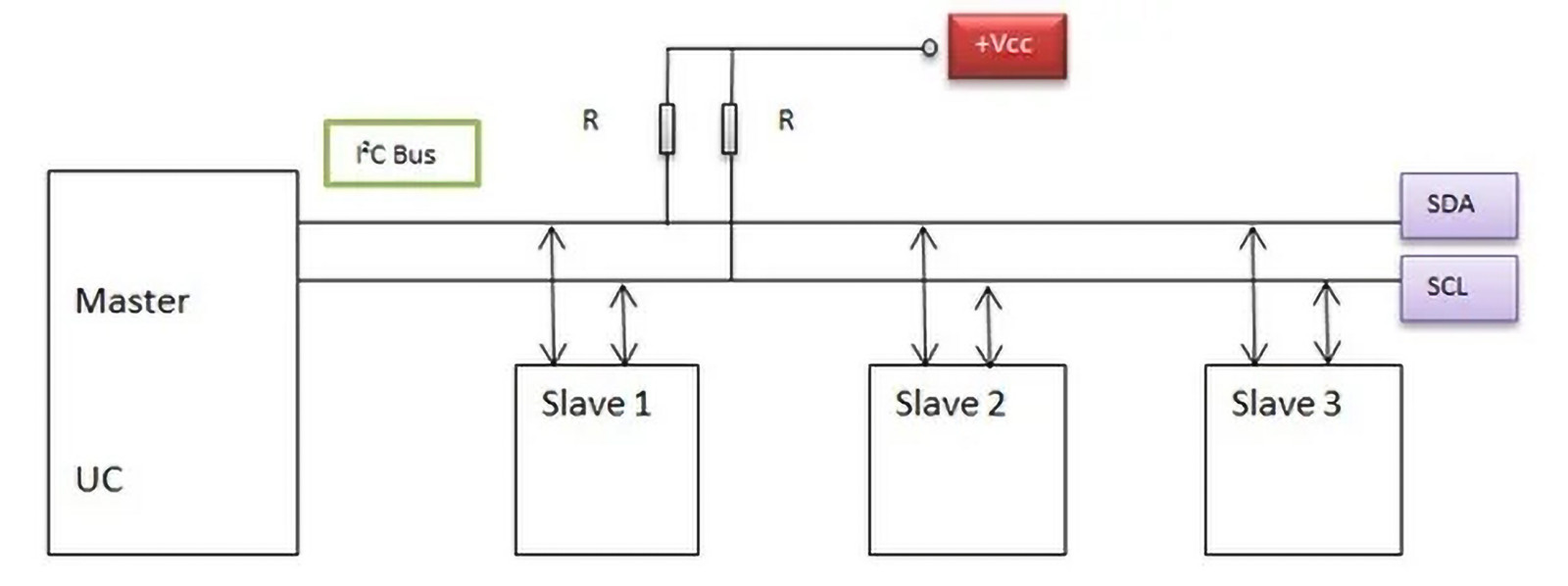
Protok√≥Ňā I¬≤C jest szeregowym, synchronicznym protokoŇāem dwukierunkowej wymiany danych. Od¬†strony elektrycznej magistrala skŇāada sińô z¬†dw√≥ch linii: do¬†przesyŇāania danych (oznaczanej najczńôŇõciej jako SDA) oraz zegarowych impuls√≥w synchronizujńÖcych (oznaczanej jako SCL). Interfejsy wszystkich ukŇāad√≥w doŇāńÖczonych do¬†magistrali sńÖ¬†typu otwarty dren, wińôc mogńÖ aktywnie wymusińá na¬†magistrali jedynie stan niski. Z¬†tego powodu linie SDA i¬†SCL muszńÖ byńá podcińÖgane do¬†napińôcia zasilania za¬†pomocńÖ osobnych opornik√≥w. UkŇāady podŇāńÖczone do¬†magistrali peŇānińÖ funkcjńô mastera (ukŇāadu nadrzńôdnego) lub slave‚Äôa¬†(ukŇāadu podrzńôdnego). Na¬†rysunku¬†1 pokazano schemat typowej magistrali I¬≤C z¬†podŇāńÖczonymi ukŇāadami.
KaŇľdńÖ transmisjńô ‚Ästzar√≥wno zapisu, jak i¬†odczytu danych pomińôdzy masterem a¬†slave‚Äôem ‚Ästzawsze inicjuje urzńÖdzenie nadrzńôdne. PrzesyŇā danych otwiera sekwencja START, po¬†kt√≥rej wysyŇāany jest 7-bitowy (lub, w¬†trybie rozszerzonym, 10-bitowy) identyfikator ukŇāadu, do¬†kt√≥rego kierowana jest transmisja.
Poziom ostatniego, √≥smego bitu identyfikatora okreŇõla, czy chodzi o¬†zapis (poziom niski), czy odczyt (poziom wysoki). UrzńÖdzenie, kt√≥rego identyfikator zostaŇā wysŇāany, potwierdza swojńÖ gotowoŇõńá sygnaŇāem ACK, czyli wymusza na¬†linii SDA stan niski w¬†czasie 9. taktu zegara. W¬†nastńôpnej kolejnoŇõci, w¬†przypadku zapisu, wysyŇāane sńÖ¬†przez mastera bajty danych. W¬†przypadku odczytu to¬†zaadresowane urzńÖdzenie podrzńôdne wysyŇāa bajty danych w¬†takt zegara SCL. Transmisjńô zamyka sekwencja STOP, po¬†kt√≥rej magistrala powinna zostańá zwolniona.
Interfejsy API sterowników I²C
ESP32 ma wbudowane dwa kontrolery sprzńôtowe odpowiedzialne za¬†obsŇāugńô komunikacji za¬†poŇõrednictwem magistrali I¬≤C. Pojedynczy kontroler I¬≤C moŇľe dziaŇāańá jako master lub slave. Do¬†podŇāńÖczenia do¬†magistrali I¬≤C sŇāuŇľńÖ predefiniowane porty: GPIO21 jako SDA i¬†GPIO22 jako SCL, jednak moŇľna te¬†funkcje zmienińá programowo i¬†wybrańá inne linie wejŇõcia/wyjŇõcia.
ESP-IDF dostarcza bibliotekńô driver/i2c.h, kt√≥ra steruje blokami peryferyjnymi I¬≤C moduŇāu ESP32. Najistotniejsze procedury biblioteki to:
i2c_param_config() ‚Ästinicjalizacja sterownika I¬≤C. Funkcja ma dwa parametry:
- i2c_port_t ‚Ästnumer portu: I¬≤C_NUM_0 lub I¬≤C_NUM_1,
- i2c_config_t ‚ÄstwskaŇļnik na¬†strukturńô zawierajńÖcńÖ takie parametry konfiguracyjne, jak: tryb pracy, numery uŇľytych port√≥w GPIO do¬†podŇāńÖczania linii SDA i¬†SCL, prńôdkoŇõńá zegara. PrzykŇāad struktury moŇľna zobaczyńá na¬†listingu¬†1.
i2c_config_t conf = {
.mode = I²C_MODE_MASTER, //tryb pracy
.sda_io_num = 21, //numer GPIO poŇāńÖczony z SDA
.scl_io_num = 22, //numer GPIO poŇāńÖczony z SCL
.sda_pullup_en = GPIO_PULLUP_ENABLE, //wŇāńÖczenie wewnńôtrznego podcińÖgania SDA
.scl_pullup_en = GPIO_PULLUP_ENABLE, //wŇāńÖczenie wewnńôtrznego podcińÖgania SCL
.master.clk_speed = 400000, //szybkoŇõńá zegara
};
Listing 1. PrzykŇāadowa definicja struktury i2c_config_ti2c_driver_install() ‚Ästinstalacja sterownika. Funkcja ma 5¬†parametr√≥w:
- i2c_port_t ‚Ästnumer portu I¬≤C,
- i2c_mode_t ‚Ästtryb pracy: master lub slave,
- kolejne 2 parametry okreŇõlajńÖ rozmiar bufor√≥w: nadawczego i¬†odbiorczego. JeŇľeli urzńÖdzenie bńôdzie pracowańá w¬†trybie mastera, mogńÖ byńá one ustawione na¬†0,
- ostatni parametr to¬†flagi zwińÖzane z¬†przerwaniami. JeŇľeli w¬†obsŇāudze magistrali I¬≤C nie korzystamy z¬†przerwaŇĄ, wartoŇõńá parametru moŇľe wynosińá 0.
i2c_master_write_to_device() ‚ÄstwysŇāanie danych do¬†urzńÖdzenia podrzńôdnego. Funkcja moŇľe byńá wywoŇāywana tylko w¬†celu obsŇāugi ukŇāad√≥w pracujńÖcych w¬†trybie master i¬†przyjmuje 5 parametr√≥w:
- i2c_port_t ‚Ästnumer portu I¬≤C,
- device_address ‚Äst7-bitowy adres urzńÖdzenia podrzńôdnego, do¬†kt√≥rego bńôdńÖ zapisywane bajty danych,
- write_buffer ‚ÄstwskaŇļnik do¬†bufora z¬†bajtami do¬†wysŇāania,
- write_size ‚Ästrozmiar bufora zapisu (wyraŇľony w¬†bajtach),
- ticks_to_wait ‚Ästmaksymalny czas oczekiwania na¬†zakoŇĄczenie przesyŇāania danych.
Funkcja jest dostńôpna, poczńÖwszy od¬†wersji ESP-IDF v.4.4.
Alternatywnie moŇľna uŇľywańá funkcji i2c_cmd_link_create(), i2c_master_start(), i2c_master_write_byte(), i2c_master_write(), i2c_master_stop(), i2c_master_cmd_begin(), i2c_cmd_link_delete().
i2c_master_read_from_device() ‚Ästodczyt danych z¬†urzńÖdzenia podrzńôdnego. Funkcja moŇľe byńá wywoŇāywana tylko do¬†obsŇāugi ukŇāad√≥w pracujńÖcych w¬†trybie master i¬†ma 5 parametr√≥w:
- i2c_port_t ‚Ästnumer portu,
- device_address ‚Äst7-bitowy adres urzńÖdzenia podrzńôdnego, z¬†kt√≥rego bńôdńÖ odczytywane bajty danych,
- read_buffer ‚ÄstwskaŇļnik do¬†bufora odczytywanych danych,
- read_size ‚Ästrozmiar bufora odczytu (w¬†bajtach),
- ticks_to_wait ‚Ästmaksymalny czas oczekiwania na¬†zakoŇĄczenie odczytu danych.
Funkcja jest dostńôpna od¬†ESP-IDF v.4.4. Alternatywnie moŇľna uŇľywańá funkcji i2c_master_start(), i2c_master_write(), i2c_master_read(), itd.



















{kind=link}