
- 4 przekaźniki wykonawcze (125 V AC lub 28 V DC/12 A).
- Sygnalizacja statusu za pomocą diod LED oraz aplikacji sterującej.
- Wyłącznik awaryjny wyłączający wszystkie przekaźniki. Możliwość blokady sterowania.
- Sterowanie za pomocą aplikacji dla systemu Android (lub wykonanej samodzielnie).
- Mikrokontroler ATmega8, moduł Bluetooth BTM222.
Sercem układu jest mikrokontroler ATmega8 pracujący z zewnętrznym rezonatorem kwarcowym 7,3728 MHz. Częstotliwość taktowania mikrokontrolera tak dobrano, aby błąd transmisji układu USART był jak najmniejszy. Rezystor R1 (10 kΩ) zasila wyprowadzenie zerujące, aby mikrokontroler nie został zrestartowany przez zaburzenia mogące wystąpić na doprowadzeniu. Przekaźniki są włączane kluczami tranzystorowymi. Rezystory R4…R7 ograniczają prąd baz tranzystorów, a diody D5…D8 zabezpieczają tranzystory przed przepięciami, które występują podczas wyłączania przekaźników. Rezystory R8…R11 ograniczają prąd diod LED D1…D4 wizualizujących stan przekaźników.
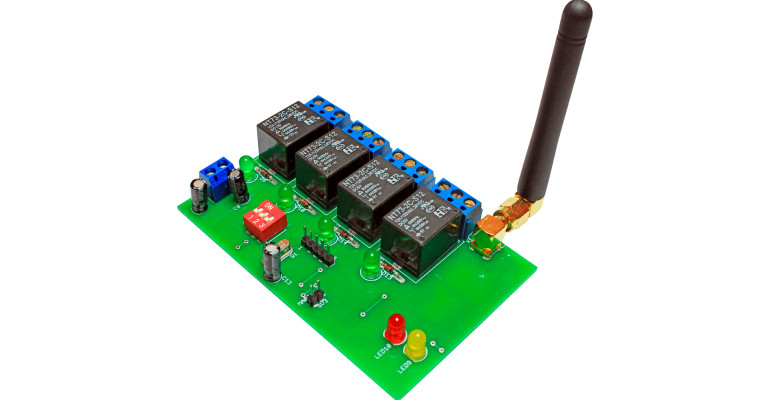
Jako moduł radiowy Bluetooth zastosowano BTM-222 firmy Rayson pracujący w klasie 1 i zapewniający zasięg rzędu 100 metrów. Do uzyskania takiego zasięgu jest wymagana antena zewnętrzna. W projekcie wykorzystano pokazaną na fotografii 2 antenę BLU-ANT01R o impedancji 50 Ω, pracującą w zakresie częstotliwości 2,4…2,5 GHz z zyskiem energetycznym 1 dBi. Antenę dołączono do gniazdka SMA umieszczonego na płytce PCB. Komunikacja z modułem jest zwyczajną transmisją szeregową RS232, jednak moduł pracuje przy poziomach logicznych CMOS 3,3 V, a mikrokontroler 5 V, dlatego zastosowano konwerter poziomów zbudowany z użyciem bramki 74HC14 oraz dzielnika rezystancyjnego R2/R3. Wejścia niewykorzystanych bramek dołączono do masy, aby uniknąć zakłóceń.
Program sterujący mikrokontrolerem napisano za pomocą Bascoma AVR. W pętli głównej program sprawdza stany przełączników stykowych bufor wejściowy. Włączaniu i wyłączaniu poszczególnych przekaźników przypisano komendy w postaci kodów ASCII, dlatego zmiana stanu danego przekaźnika odpowiada przesłaniu odpowiedniego znaku z terminalu. Z racji zastosowania możliwości blokowania sterowania bezprzewodowego stan przycisku blokującego jest co kilka sekund przesyłany do odbiornika w postaci wyrazów: „ENABLED” oraz „DISABLED”. Takie rozwiązanie nie jest konieczne, ale zostało wprowadzone, aby nie zakłócić odzwierciedlania stanu przycisków w programie komputerowym.