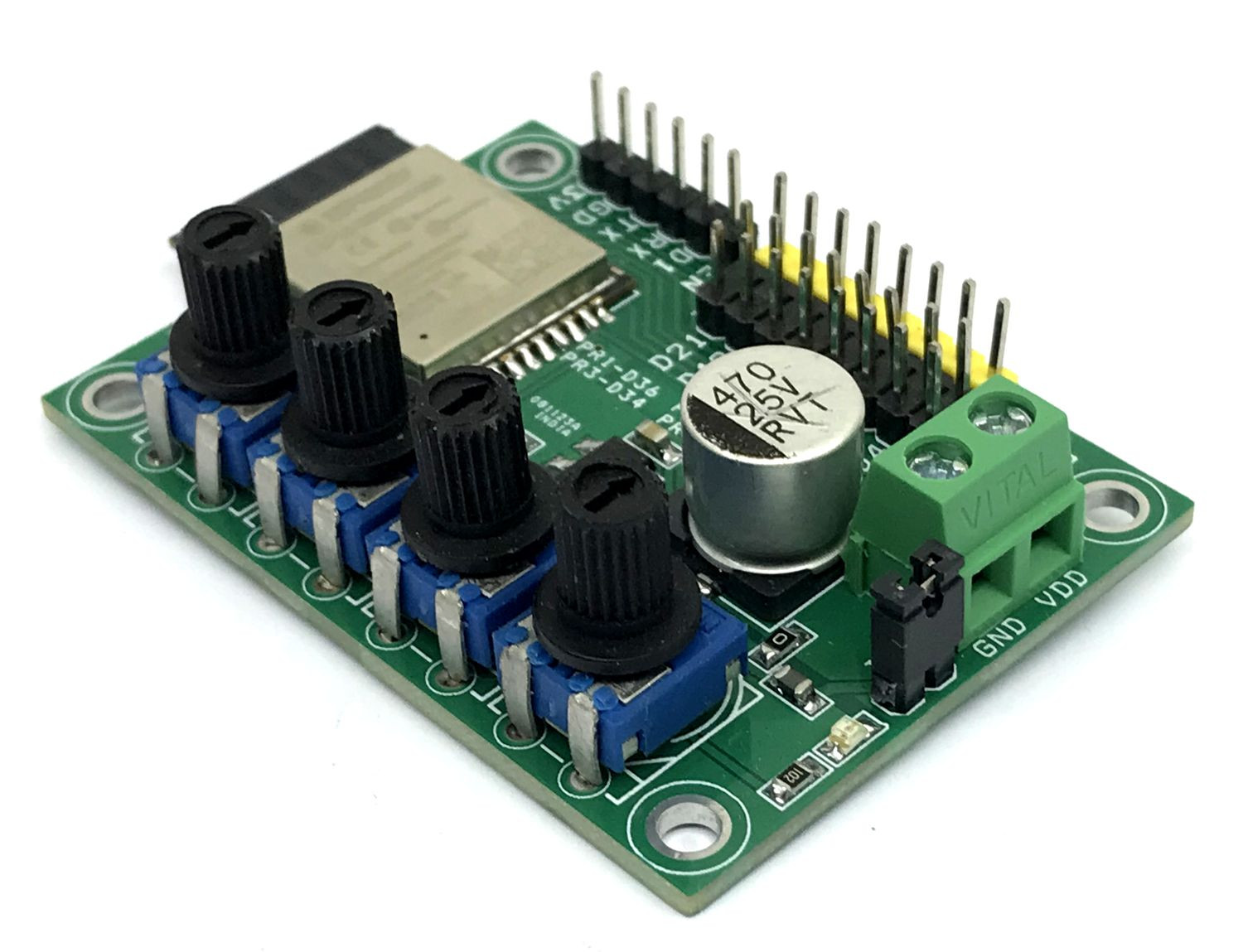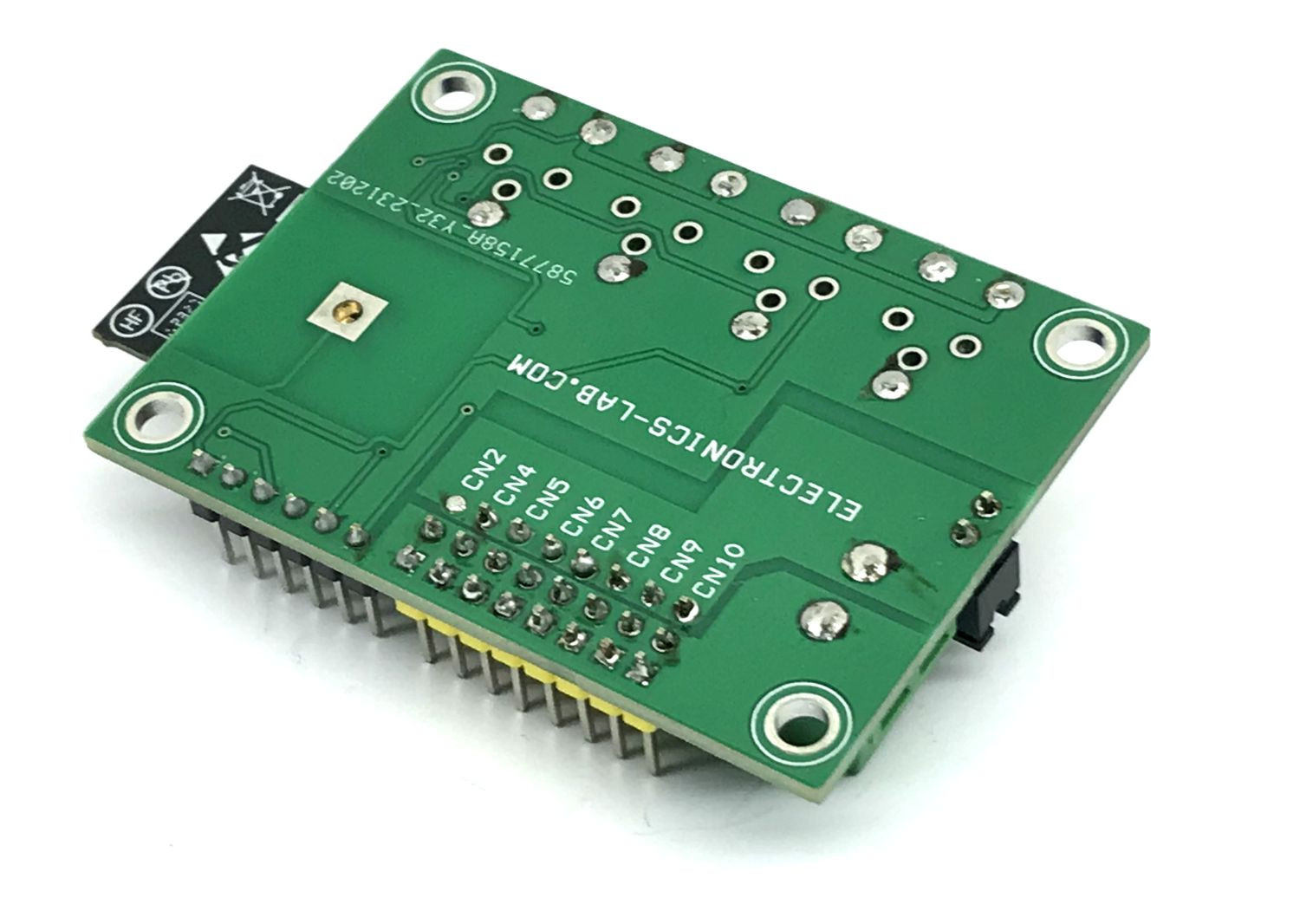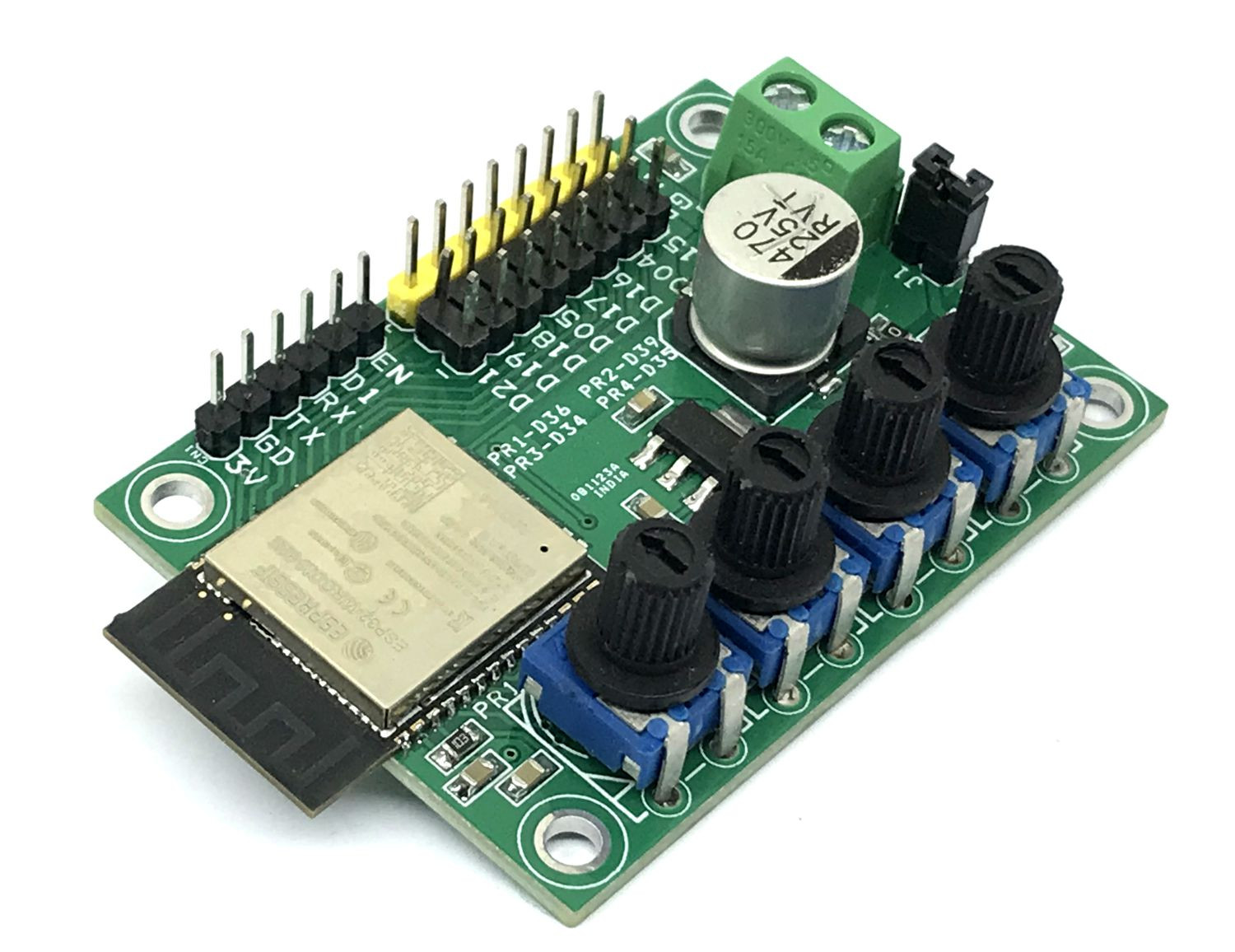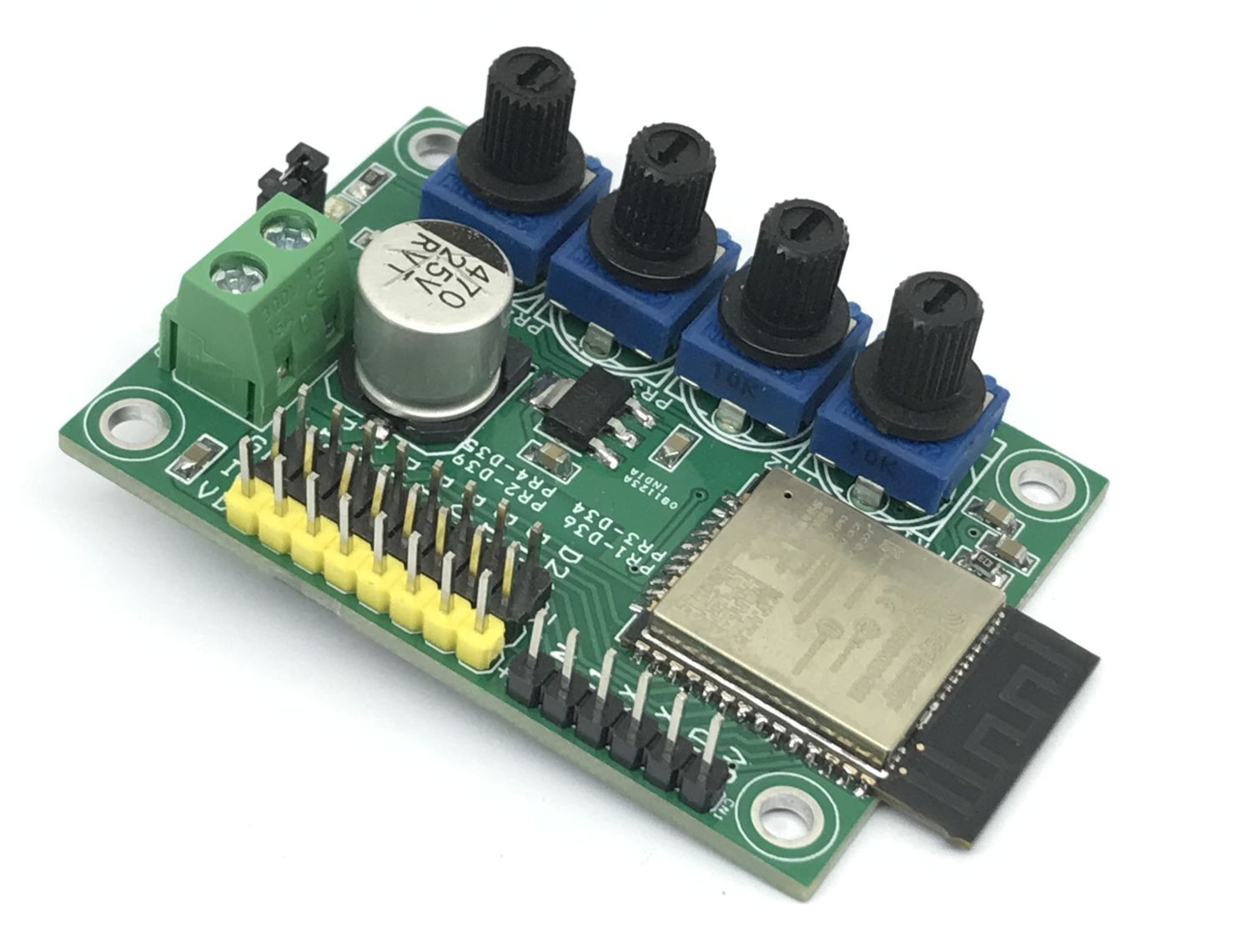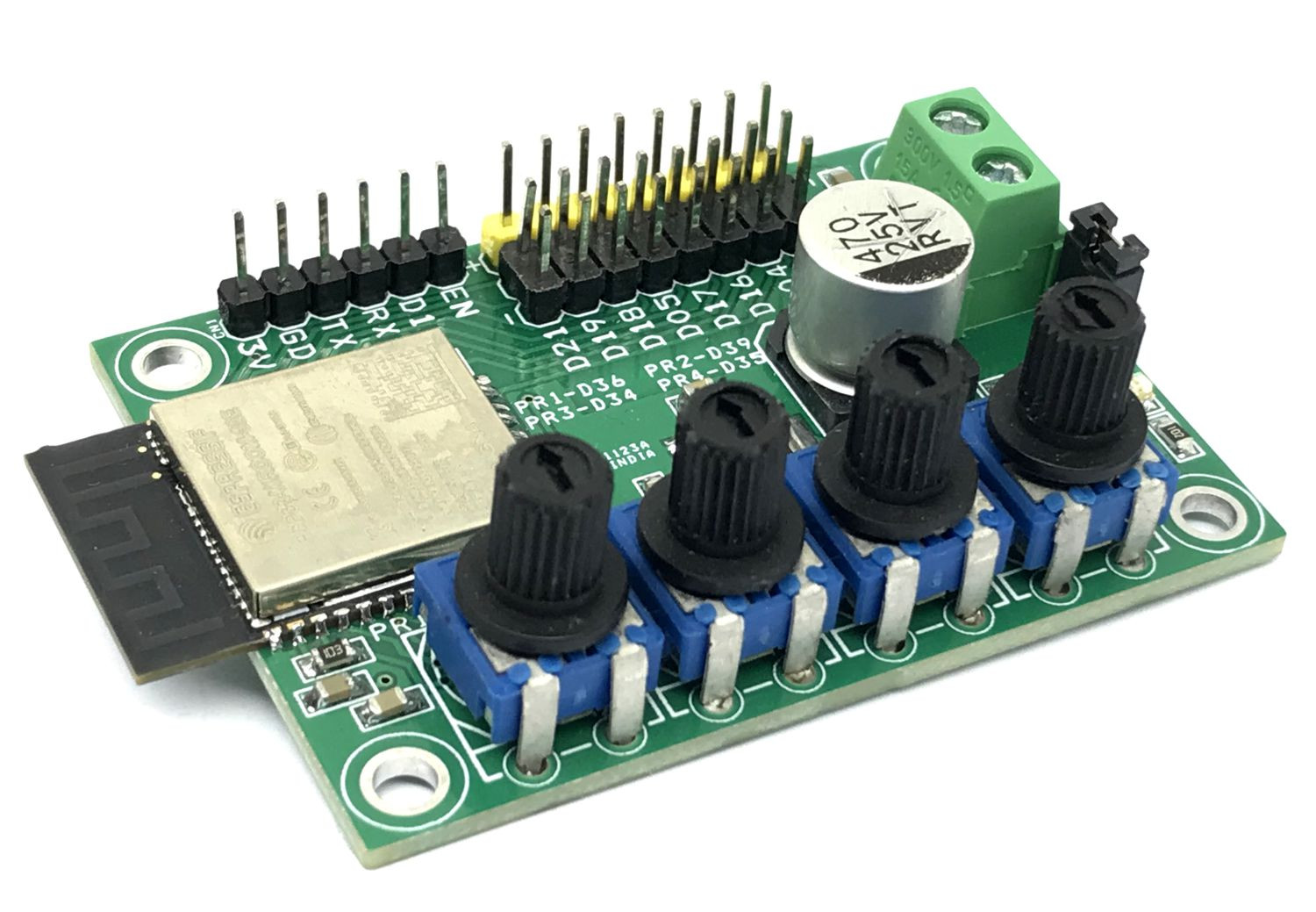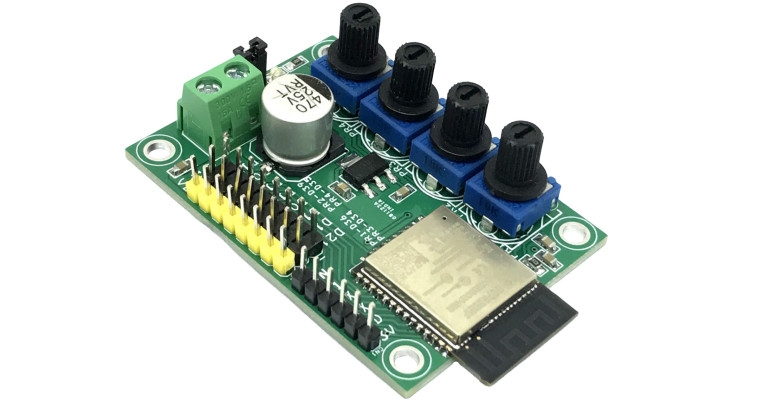

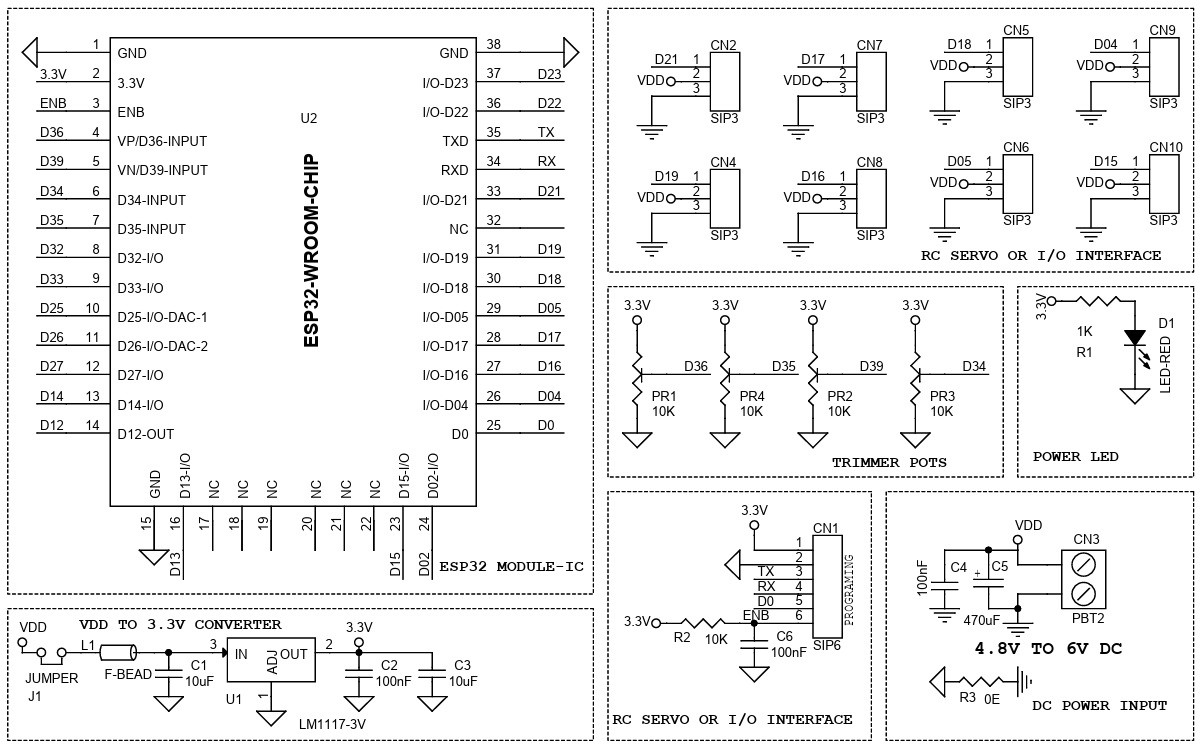
Projekt ten umożliwia użytkownikowi bezprzewodowe sterowanie ramieniem robota opartym na serwomechanizmie RC. Płytka oparta jest na module Bluetooth/Wi-Fi ESP32-WROOM 32E, dzięki czemu można sparować z nią bezprzewodowy pilot PS3 lub PS4. Projekt zbudowano przy użyciu układu ESP32 z łącznością Bluetooth i Wi-Fi, 4 potencjometrów podłączonych do pinów analogowych, 8 złączy 3-pinowych ułatwiających podłączenie serwomechanizmów RC, zasilania w zakresie od 4,8 V do 6 V DC, regulator LM1117-3,3 V U1 zapewnia napięcie 3,3 V dla procesora ESP32, kondensator zasilania prądem stałym C5 pomaga w płynnym działaniu serwomechanizmów RC, należy użyć bocznika, aby zamknąć zworkę J1.
ESP32 można zaprogramować za pomocą ARDUNO IDE. Przykładowy kod dostarczony do przetestowania projektu. Użytkownik będzie mógł sterować jednym serwomechanizmem RC podłączonym do pinu GPIO15 ESP32. Aby wykonać ruch serwomechanizmu RC, należy użyć prawego joysticka PS3. Więcej szczegółów na temat interfejsu E...