
- Płytka Arduino Uno.
- Moduł sterownika silników dla Arduino – płytka AVT1619.
- Moduł Bluetooth AVT1635.
- Koszyk na baterie 4×R6.
- Dioda prostownicza np. 1N4007.
- Kondensator 2200 μF/10 V.
- Przewody połączeniowe.
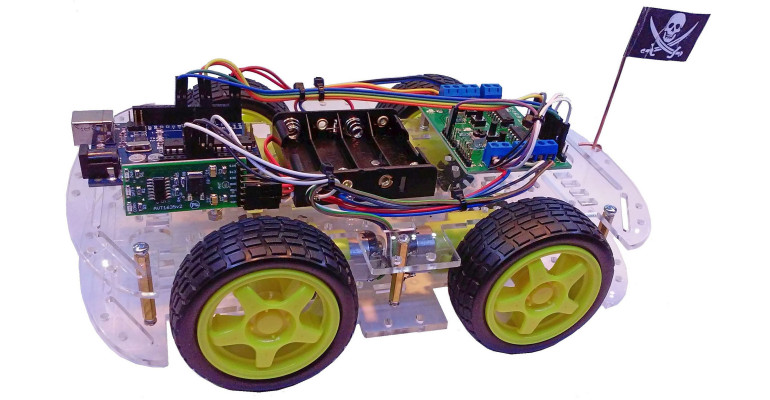
Do budowy pojazdu użyto gotową platformę jezdną, dzięki czemu część mechaniczna jest prosta w wykonaniu, nie będziemy tracili czasu na wykonywanie elementów pojazdu, a montaż sprowadza się do zamocowania za pomocą śrub gotowych elementów.
Platforma ma wiele otworów montażowych, dzięki czemu można łatwo zamontować dodatkowy osprzęt używając śrub i gwintowane tulejki dystansujące.
Do sterowania pojazdem służy smartfon lub inne urządzenie z systemem Android i zainstalowaną aplikacją Vehicle_v1. Na początek, na ekranie startowym należy wybrać urządzenie Bluetooth, z którym aplikacja ma się połączyć – chodzi o Serial Adapter, ponieważ tak jest rozpoznawany układ BTM222 zamontowany w module AVT1635. Po nawiązaniu połączenia z pojazdem zostanie wyświetlona informacja na ekranie, a na płytce Arduino powinna zaświecić się dioda LED informująca o poprawnym połączeniu. W górnej linii okna aplikacji jest wyświetlony status pojazdu: „Stop” oznacza pojazd zatrzymany, „GO!!!” to pojazd w ruchu. Kolejne trzy linie „X=”, „Y=” oraz „Z=” zawierają dane odczytane z akcelerometru. Ostatnia linia przedstawia treść komendy wysyłanej do pojazdu – ma ona postać „\n x wartość Y, wartość Z \n”.
Przycisk „Reset” służy do wyzerowania wartości współrzędnych x, y, z w położeniu neutralnym – zerowanie należy wykonać przed każdą jazdą. Dopóki przycisk „Go!” Jest zwolniony, do pojazdu dociera komenda „x0,0” (pojazd zatrzymany). Dopiero, gdy przycisk „Go!” jest wciśnięty i trzymany, parametry komendy przybierają wartości niezerowe.
Program sterujący pojazdem napisano w środowisku Arduino. Program wykonuje dwa ważne zadania. Pierwsze, to odczytywanie danych z portu szeregowego UART, które są odbierane za pomocą modułu Bluetooth. Wśród nich wyszukiwane są ciągi w postaci „\n x Y , Z \n”. Symbol „\n” to znak nowej linii; „x” – umowny znacznik początku komendy; „Y”, „Z” – odczytane i przetworzone dane z akcelerometru w zakresie -99…99 oraz przecinek oddzielający parametry.