
CaŇāoŇõńá jako system umoŇľliwia prezentacjńô danych za poŇõrednictwem strony internetowej, ale trudno wymagańá, by za kaŇľdym razem, by sprawdzińá aktualny stan, chodzińá do piwnicy z telefonem komórkowym. Z tego powodu zostaŇāa przewidziana moŇľliwoŇõńá lokalnego prezentowania danych w oparciu o typowe siedmiosegmentowe wyŇõwietlacze LED.
Zanim przejdńô do szczegóŇāowego opisu moduŇāów realizujńÖcych zakŇāadanńÖ funkcjonalnoŇõńá, przedstawińô ideńô rozwińÖzania, którńÖ prezentuje rysunek 1.
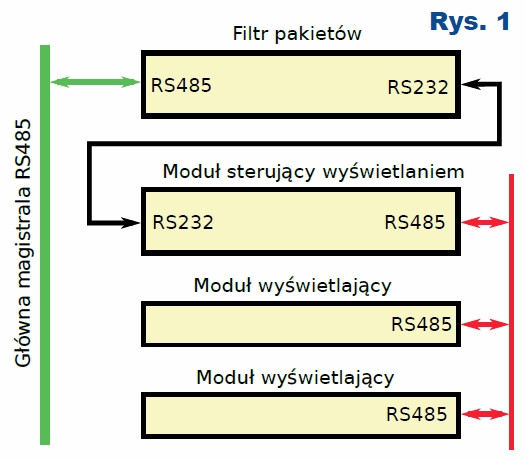
Do gŇāównej magistrali RS485 przyŇāńÖczony jest moduŇā realizujńÖcy funkcjńô specjalizowanego filtru danych. Jego zadaniem jest obserwacja caŇāego ruchu pakietów odbywajńÖcego sińô na gŇāównej magistrali RS485. SpecyficznńÖ cechńÖ interfejsu RS485 pracujńÖcego w trybie póŇādupleksowym jest to, Ňľe kaŇľdy element komunikacyjny przyŇāńÖczony do magistrali odbiera wszystko, co jest tam transmitowane. Oprogramowanie „filtru pakietów” analizuje kaŇľdy odebrany pakiet pod kńÖtem jego znaczenia. W przypadku, gdy pakiet niesie w sobie informacje o danych pomiarowych, jest on retransmitowany do interfejsu RS232.
PrzesyŇāane dane trafiajńÖ do kolejnego moduŇāu, którego zadaniem jest gromadzenie w swojej pamińôci RAM aktualnych wartoŇõci pomiarowych oraz ewentualnie rozdzielanie odpowiednich danych na poszczególne wyŇõwietlacze. KaŇľdy moduŇā wyŇõwietlajńÖcy otrzymuje dane za poŇõrednictwem ŇāńÖcza szeregowego. Istnieje moŇľliwoŇõńá przyŇāńÖczenia wielu moduŇāów wyŇõwietlajńÖcych, co implikuje zastosowanie interfejsów RS485 tworzńÖcych lokalnńÖ magistralńô komunikacyjnńÖ, w której wŇāaŇõnie moduŇā sterujńÖcy jednoczeŇõnie peŇāni funkcjńô typu MASTER (kaŇľdy moduŇā wyŇõwietlajńÖcy to SLAVE).
Z punktu widzenia sprzńôtowego filtr pakietów (fotografia 1) bazuje na tym samym rozwińÖzaniu sprzńôtowym, które realizuje funkcjńô procesora komunikacyjnego („Elektronika dla Wszystkich”, 5/2019), toteŇľ obecnie zostanie omówione jedynie oprogramowanie tego moduŇāu. Bazuje ono równieŇľ na oprogramowaniu procesora komunikacyjnego z tym, Ňľe jest znaczńÖco uproszczone. Istotnym elementem w procesorze komunikacyjnym, którego nie znajdziemy w oprogramowaniu filtru pakietu, jest zarzńÖdzanie komunikacjńÖ na magistrali RS485.
Jednym z gŇāównych zadaŇĄ realizowanych przez procesor komunikacyjny jest zarzńÖdzanie komunikacjńÖ na magistrali RS485. W przypadku filtru pakietów ta funkcjonalnoŇõńá nie wystńôpuje. Z punktu widzenia ogólnej koncepcji komunikacji realizowanej poprzez magistralńô RS485 omawiany moduŇā trudno jest nawet nazwańá elementem typu SLAVE.
ModuŇā nie realizuje aktywnego dostepu do magistrali (nie nadaje danych), jego funkcjonalnoŇõńá sprowadza sińô jedynie do nasŇāuchu transmitowanych danych. Z tego wynika dosyńá istotna dla procesora komunikacyjnego wŇāasnoŇõńá, nie musi on znańá identyfikatora przypisanego moduŇāowi peŇānińÖcemu funkcjńô filtru pakietów. W istocie filtr jest jedynie obserwatorem rzeczywistoŇõci wystńôpujńÖcej na magistrali komunikacyjnej.
ŇĀatwo to zauwaŇľyńá w oprogramowaniu. Zastosowany mikrokontroler (ATMEGA324) nie zawiera obsŇāugi interfejsu szeregowego z konwerterem do standardu RS485 (jest tylko obsŇāuga przerwaŇĄ, gdyŇľ kaŇľde przerwanie musi mieńá swojńÖ funkcjńô obsŇāugi). Brak funkcjonalnoŇõci zwińÖzanej z aktywnym dostńôpem do magistrali komunikacyjnej oznacza, Ňľe moduŇā nie ma wŇāasnego identyfikatora, a to prowadzi do braku bloku konfiguracyjnego zapisanego w pamińôci nieulotnej (tak jak we wszystkich dotychczasowych programach stosowanych w moduŇāach). PatrzńÖc na filtr pakietów z punktu widzenia caŇāego systemu, moduŇā ten jest niekonfigurowalny.
JedynńÖ czynnoŇõcińÖ, jaka jest realizowana w oprogramowaniu moduŇāu, jest odebranie kompletnego pakietu z interfejsu RS485 (w mikrokontrolerze jest to UART1). Algorytm odebrania danych z jednoczesnńÖ analizńÖ odbieranych treŇõci jest identyczny jak we wszystkich dotychczasowych rozwińÖzaniach i jest pokazany na listingu 1. Uwaga – wszystkie listingi sńÖ dostńôpne w Elportalu wŇõród materiaŇāów dodatkowych do tego numeru EdW.
Po odebraniu kompletnego pakietu (kaŇľdy jest zakoŇĄczony znakiem sterujńÖcym CR) realizowane jest jego przetwarzanie. Polega ono na tym, Ňľe sprawdzana jest treŇõńá pola zawierajńÖcego identyfikator polecenia. W przypadku, gdy polecenie niesie w sobie dane pomiarowe (polecenie RPV), jest ono retransmitowane do interfejsu RS232 (zwińÖzanego w mikrokontrolerze z UART0).
Ze wzglńôdu na skńÖpe zasoby pamińôci RAM w mikrokontrolerach nie jest przechowywane w pamińôci oryginalne odebrane polecenie, a jedynie rozpakowane jego czńôŇõci skŇāadowe. Retransmisja sprowadza sińô do ponownego zbudowania z czńôŇõci skŇāadowych nowego kompletnego polecenia. Fragment oprogramowania realizujńÖcy przetwarzanie odebranych danych zawiera listing 2.
Ze wzglńôdu na peŇānodupleksowy charakter pracy interfejsu RS232 nie zachodzi tu Ňľadne buforowanie ani Ňľadna synchronizacja czasowa zwińÖzana z fizycznym wytransmitowaniem danych. Finalnie z caŇāego potoku róŇľnych danych krńÖŇľńÖcych na magistrali RS485 na wyjŇõciu w standardzie RS232 pojawińÖ sińô jedynie dane zawierajńÖce zmierzone wartoŇõci wielkoŇõci fizycznych.
BazujńÖc na tym samym rozwińÖzaniu sprzńôtowym, w systemie jest przewidziany filtr pakietów z innńÖ funkcjonalnoŇõcińÖ. Zapewne wielu Czytelników zastanowiŇā identyfikator „sieci RS485” o brzmieniu HCS. W wyniku konfiguracji kaŇľdego moduŇāu pomiarowego lub wykonawczego, które byŇāy opisane wczeŇõniej, generujńÖ one informacje adresowane do „mitycznego” miejsca docelowego o nazwie HCS.
WyobraŇļmy sobie, Ňľe w caŇāej instalacji znajduje sińô komputer PC z zainstalowanym oprogramowaniem bazy danych. W sieci internetowej moŇľna odszukańá oprogramowanie baz danych przeznaczonych do zastosowaŇĄ niekomercyjnych (przykŇāadowo MySQL). OczywiŇõcie wymagaŇāoby to w komputerze niewielkiego programu, który odebraŇāby dane ze swego interfejsu RS232 i dodawaŇā kolejne przychodzńÖce informacje (wraz ze znacznikiem czasowym) do bazy danych.
Wymagany filtr pakietów uzyskuje sińô równieŇľ ze sprzńôtowego rozwińÖzania przeznaczonego dla procesora komunikacyjnego. Oprogramowanie jest bardzo zbliŇľone do wyŇľej opisanego, a jego funkcjonalnoŇõńá sprowadza sińô do przekierowania danych do interfejsu RS232 jedynie tych pakietów, które jako adresata majńÖ identyfikator HCS. Nie doŇāńÖczam do materiaŇāów dodatkowych gotowego rozwińÖzania i liczńô, Ňľe zainteresowani Czytelnicy sami osińÖgnńÖ cel, bazujńÖc na posiadanych informacjach. To nie jest trudne i wymaga jedynie niewielkich przemyŇõleŇĄ.
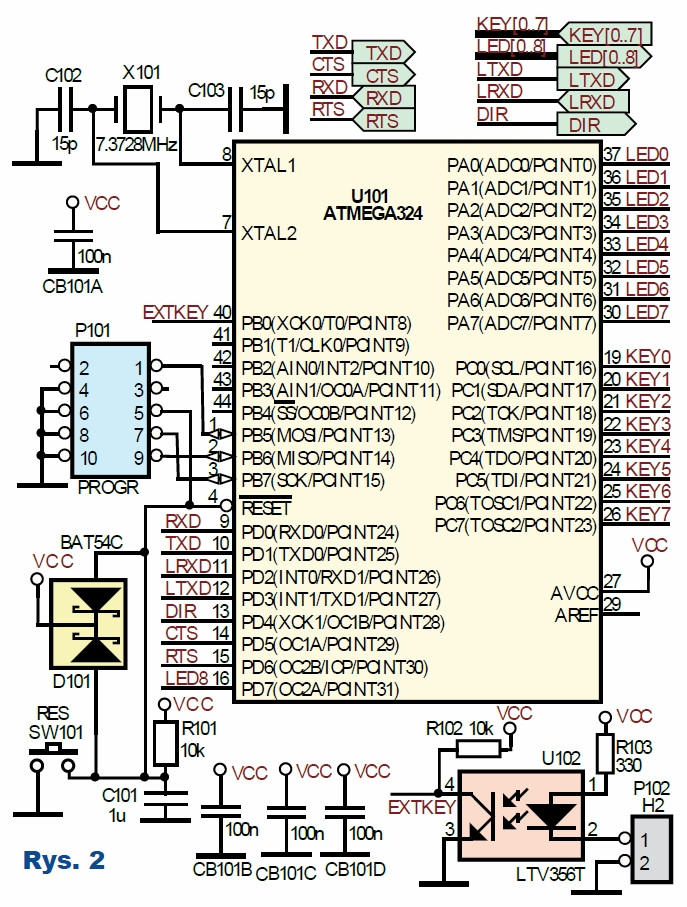
Kolejnym elementem w ŇāaŇĄcuchu moduŇāów jest element odpowiedzialny za prezentacjńô danych pomiarowych. Jego schemat ideowy przedstawiajńÖ kolejne ilustracje. Jednostka centralna pokazana jest na rysunku 2. Jest to klasyczna aplikacja mikrokontrolera z rodziny AVR. Do ukŇāadu U101 (ATmega324) sńÖ przyŇāńÖczone elementy okreŇõlajńÖce czńôstotliwoŇõńá sygnaŇāu zegarowego: X101, C102 i C103. Zastosowany rezonator kwarcowy pozwala uzyskańá kaŇľdńÖ standardowńÖ prńôdkoŇõńá transmisji szeregowej.
Do zaprogramowania wewnńôtrznej pamińôci FLASH przeznaczonej na kod programu przewidziane jest zŇāńÖcze P101 wraz z dodatkowymi elementami, których zadaniem jest wygenerowanie sygnaŇāu zerujńÖcego mikrokontroler w chwili wŇāńÖczenia napińôcia zasilajńÖcego (D101, R101 i C101). Dodatkowy mikroprzycisk SW101 pozwala zresetowańá mikrokontroler w dowolnej chwili. W konstrukcji zostaŇāa przewidziana moŇľliwoŇõńá przyŇāńÖczenia zewnńôtrznego przycisku, którego stan poprzez transoptor U102 i R102 moŇľe byńá odczytany przez mikrokontroler.
Zastosowanie transoptora uodparnia na zakŇāócenia obsŇāugńô przycisku przyŇāńÖczonego do moduŇāu nawet dŇāugim przewodem. Konstrukcja moduŇāu pozwala na realizacjńô róŇľnorodnej funkcjonalnoŇõci i nie w kaŇľdym zastosowaniu jest wykorzystana jego caŇākowita funkcjonalnoŇõńá sprzńôtowa (przykŇāadowo w poniŇľej opisanym programie sterujńÖcym nie jest uŇľyty zewnńôtrzny przycisk wykorzystujńÖcy transoptor).
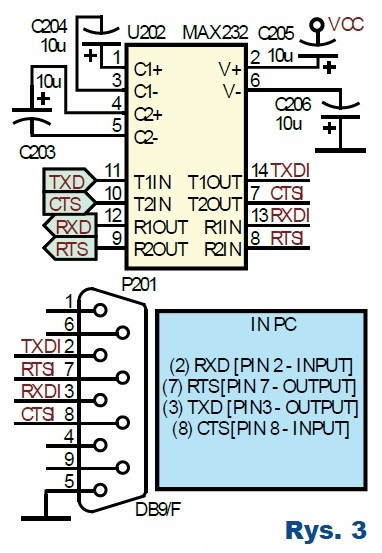
Zastosowany mikrokontroler zawiera w swojej strukturze dwa ukŇāady UART. Jeden z nich wyposaŇľony jest w interfejs RS232, którego schemat przedstawia rysunek 3. Jest to typowa aplikacja popularnego ukŇāadu MAX232, który ŇāńÖczy zŇāńÖcze interfejsu (P201) z ukŇāadem UART0 mikrokontrolera. Do zestawu doŇāńÖczone sńÖ dwie linie modemowe (wyjŇõciowa i wejŇõciowa), które mogńÖ byńá przetwarzane przez mikrokontroler.
Drugi interfejs szeregowy (UART1) jest wyposaŇľony w znany juŇľ ukŇāad SN75C176. RozwińÖzanie jest identyczne jak we wszystkich dotychczasowych moduŇāach, gdzie oprócz sygnaŇāów transmisji szeregowej wystńôpuje sygnaŇā sterujńÖcy kierunkiem transmisji (rysunek 4).
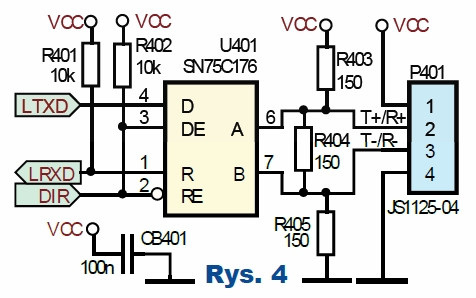
SygnaŇāy magistrali RS485 doprowadzone sńÖ do zŇāńÖcza P401, gdzie oprócz sygnaŇāów transmisji szeregowej wystńôpuje napińôcie zasilajńÖce +5V. Pozwala to wyeliminowańá z maŇāych moduŇāów wyŇõwietlaczy stabilizator napińôcia do zasilania mikrokontrolera zarzńÖdzajńÖcego obsŇāugńÖ wyŇõwietlania danych. WydajnoŇõńá prńÖdowa zastosowanego ukŇāadu stabilizatora napińôcia LM2575 (rysunek 6) znaczńÖco przekracza zapotrzebowanie moduŇāu na energińô, toteŇľ z powodzeniem jako obcińÖŇľenie mogńÖ byńá doŇāńÖczone kolejne moduŇāy wyŇõwietlaczy.
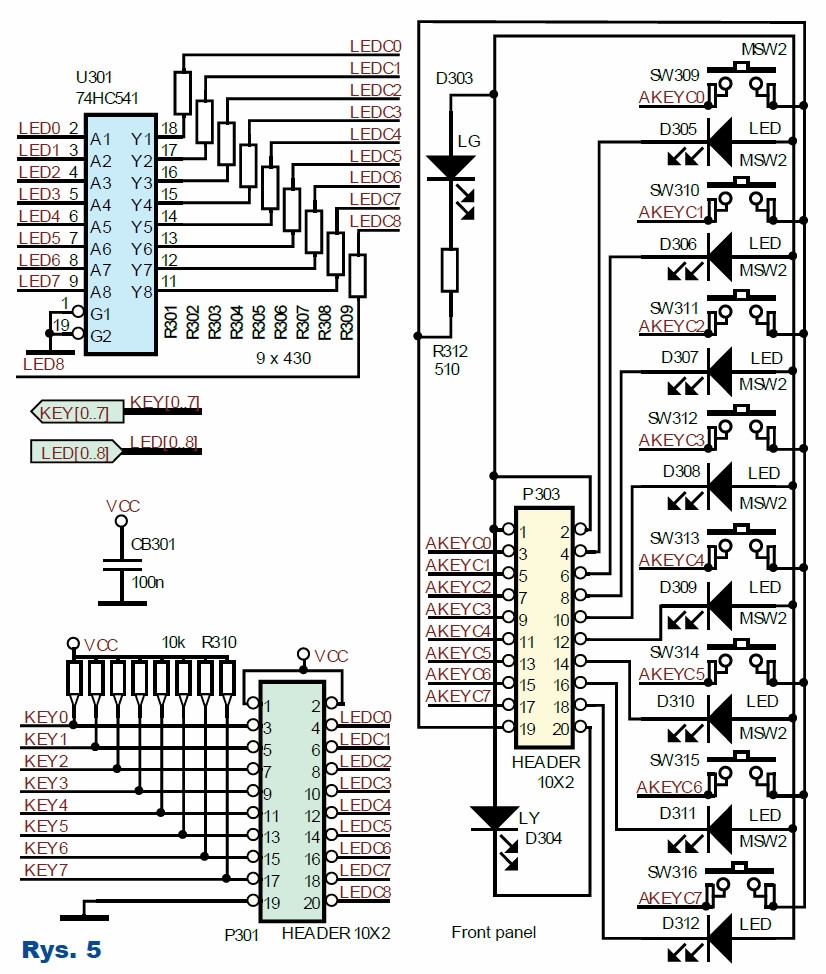
ModuŇā jest wyposaŇľony w niewielkńÖ klawiaturńô (osiem przycisków) pozwalajńÖcńÖ uŇľytkownikowi na wybór danych prezentowanych na siedmiosegmetowych wyŇõwietlaczach (sam moduŇā wyŇõwietlacza bńôdzie opisany w dalszej czńôŇõci). Jej schemat pokazuje rysunek 5. CaŇāy PORT A (rysunek 2) poprzez ukŇāad U301, peŇānińÖcy funkcjńô wzmacniacza oraz zŇāńÖcza P301 i P303 wyprowadzony jest na maŇāńÖ pŇāytkńô PCB peŇānińÖcńÖ funkcjńô frontpanelu. Zawiera ona równieŇľ zespóŇā mikroprzycisków (SW309– SW316) tworzńÖcych lokalnńÖ klawiaturńô finalnie przyŇāńÖczonńÖ do PORT C (rysunek 2).

Opis budowy moduŇāu zamyka impulsowy stabilizator napińôcia, który przetwarza wejŇõciowe napińôcie zasilajńÖce na napińôcie wymagane przez uŇľyte ukŇāady cyfrowe (rysunek 6). RozwińÖzanie byŇāo juŇľ wielokrotnie opisywane przy okazji innych moduŇāów. WyjŇõcie stabilizatora napińôcia poprzez zworkńô P502 zasila wszystkie elementy moduŇāu.
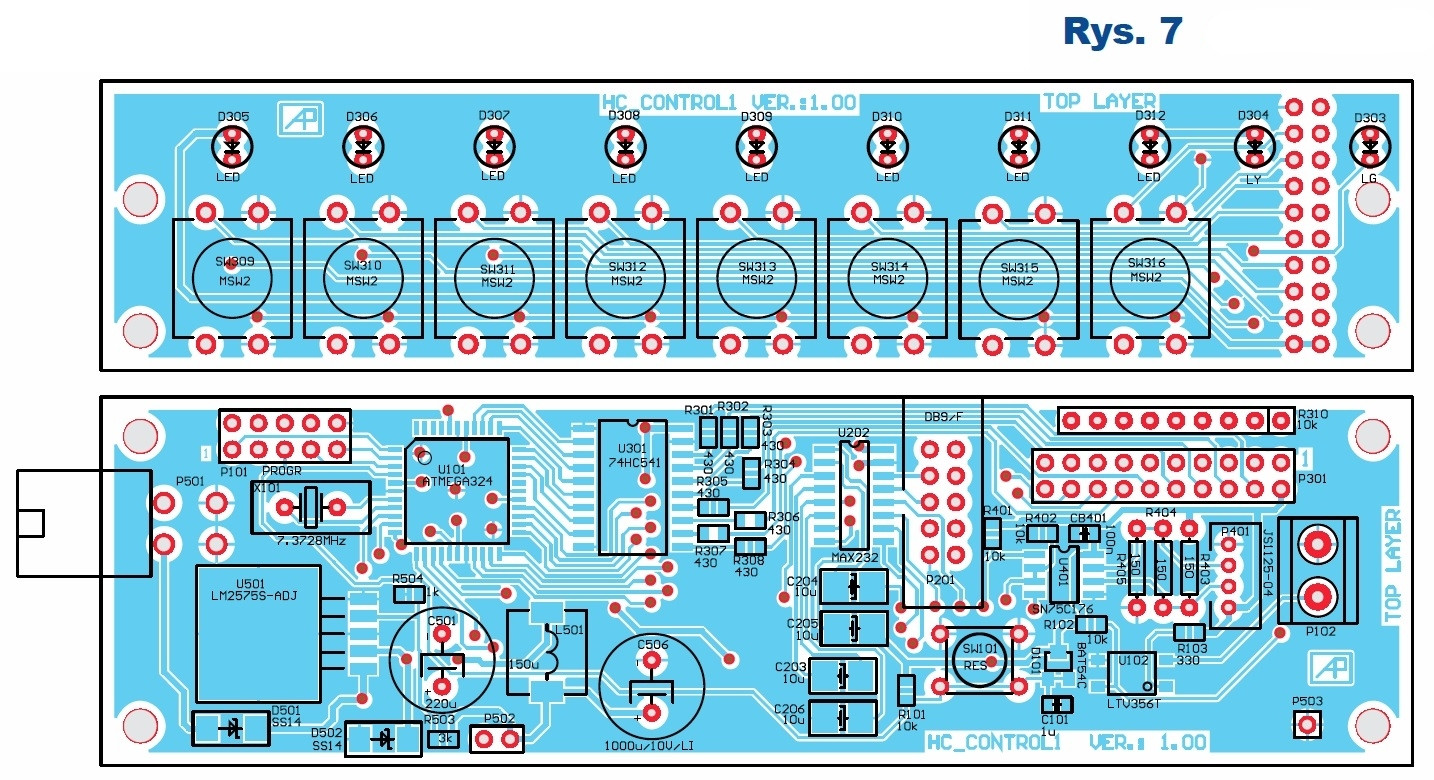
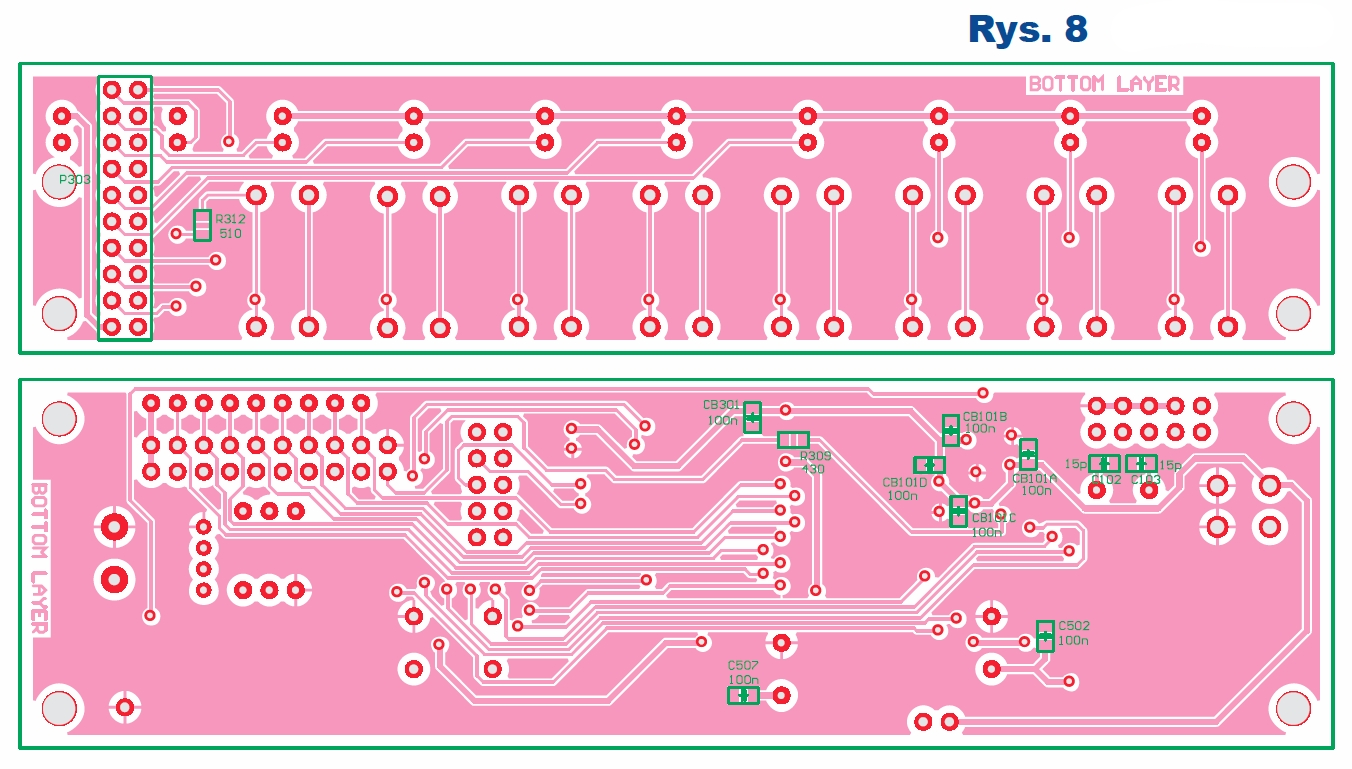
Rysunek pŇāytki drukowanej odzwierciedlajńÖcej powyŇľszy schemat ideowy jest na rysunku 7 (strona TOP) i rysunku 8 (strona BOTTOM).
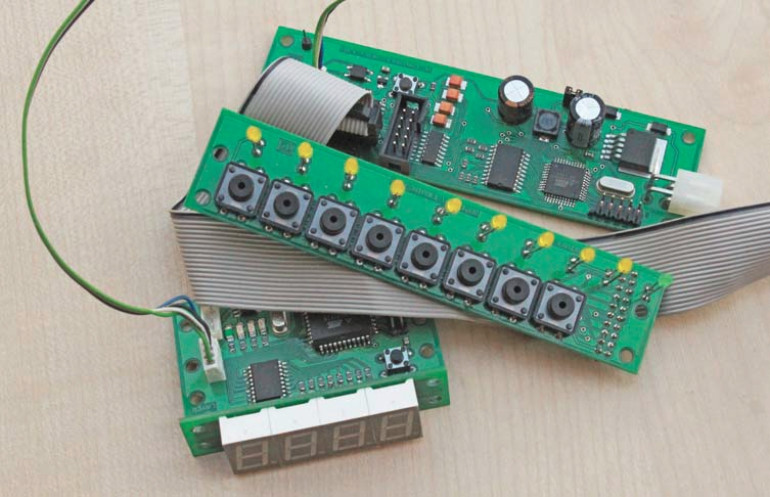
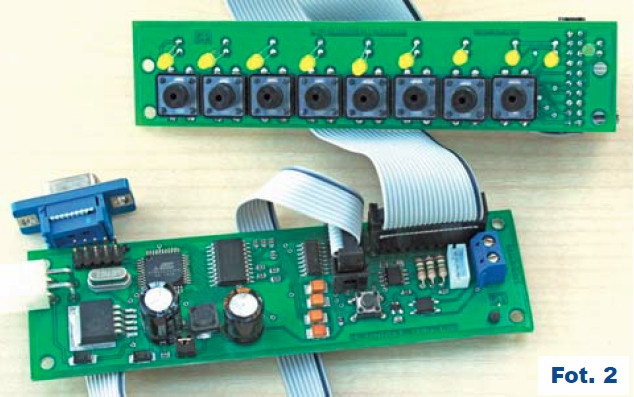
MontaŇľ urzńÖdzenia nie naleŇľy do bardzo trudnych. Zastosowanie ukŇāadów SMD wymaga pewnej cierpliwoŇõci i starannoŇõci. To zawsze póŇļniej owocuje brakiem problemów przy uruchomieniu moduŇāu. FinaŇā pracy montaŇľowej pokazuje fotografia 2.
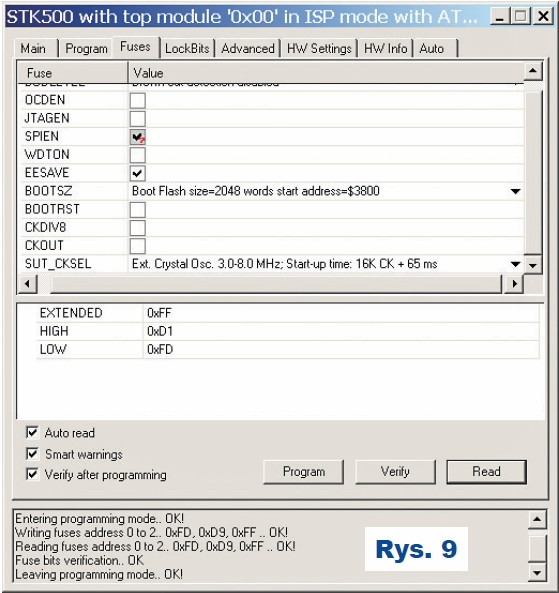
Przed pierwszym wŇāńÖczeniem tradycyjnie naleŇľy zdjńÖńá zworkńô P502 i skontrolowańá wytwarzane napińôcie zasilajńÖce. Przy poprawnym montaŇľu napińôcie wyjŇõciowe powinno wynosińá okoŇāo 5V. W takiej sytuacji moŇľna zaŇāoŇľyńá zworkńô P502. W przeciwnym wypadku naleŇľy poszukańá zimnych lutów (co jest najbardziej prawdopodobne). W dalszej kolejnoŇõci, przed zaprogramowaniem pamińôci FLASH mikrokontrolera, naleŇľy odpowiednio ustawińá bity konfiguracyjne (fuse) mikrokontrolera. W przypadku korzystania z programu AVR STUDIO 4 wymagany stan bitów fuse pokazuje rysunek 9.
W bloku konfiguracyjnym zapisanym w pamińôci nieulotnej znajdujńÖ sińô mińôdzy innymi informacje okreŇõlajńÖce, jakie dane pomiarowe sńÖ monitorowane przez moduŇā oraz gdzie sńÖ one wyŇõwietlane w wyniku naciŇõnińôcia odpowiedniego przycisku na klawiaturze. Struktura tego bloku znajduje sińô w listingu 3. WŇõród przechowywanych tam parametrów znajduje sińô lista minimoduŇāów
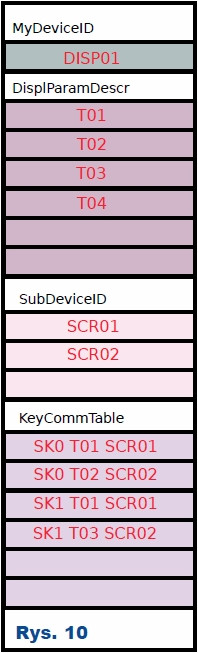
wyŇõwietlajńÖcych, przyŇāńÖczonych do lokalnej magistrali RS485 zarzńÖdzanej przez moduŇā sterujńÖcy, lista identyfikatorów danych pomiarowych oraz informacja, jakie dane sńÖ wyŇõwietlane w wyniku naciŇõnińôcia odpowiedniego przycisku klawiatury, jako kilkuelementowa tablica zawierajńÖca powińÖzania (element tablicy typu KeyCommDescrRecT): identyfikator moduŇāu, identyfikator parametru i identyfikator przycisku. PrzykŇāadowńÖ zawartoŇõńá bloku pokazuje rysunek 10.
Na podstawie tych danych program po uruchomieniu tworzy w pamińôci RAM pustńÖ tablicńô wartoŇõci pomiarowych (zmienna ParamValueArray), jest ona identycznie indeksowana jak tablica zawierajńÖca identyfikatory danych pomiarowych zawarta w bloku pamińôci konfiguracyjnej, czyli EEBlock.DisplParamDescr[0] zawiera identyfikator parametru pomiarowego a ParamValueArray[0] zawiera wartoŇõńá tego parametru.
Struktura jednego elementu tablicy zawiera wartoŇõńá parametru w postaci znakowej (pole struktury o nazwie ParamValue) oraz dowińÖzania do identyfikatorów symboli moduŇāów, na których aktualnie naleŇľy wyŇõwietlińá dane (pole struktury o nazwie SubDeviceLink). Ma to swoje odbicie w realizacji polecenia zawierajńÖcego informacje pomiarowe, której implementacjńô pokazuje listing 4.
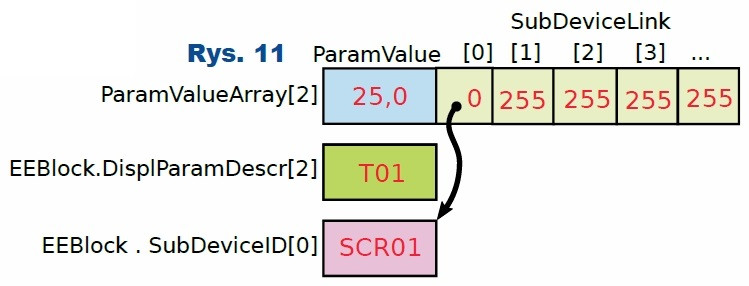
Algorytm obróbki ilustruje rysunek 11. ZaŇāóŇľmy, Ňľe zostaŇā odebrany pakiet zawierajńÖcy dane pomiarowe dla parametru o identyfikatorze T01 i wartoŇõci 25,0. Program przeszuka tablicńô
identyfikatorów parametrów pomiarowych zawartych w bloku konfiguracyjnym (EEBlock.DisplParamDescr) i odnajdzie identyfikator zmiennej pomiarowej uzyskanej z odebranych danych przykŇāadowo na indeksie 2. To oznacza, Ňľe w tablicy ParamValueArray[2] naleŇľy zapisańá wartoŇõńá parametru uzyskanńÖ z odebranego pakietu.
Pozostaje jeszcze przejrzeńá tablicńô SubDeviceLink (bńôdńÖcńÖ czńôŇõcińÖ skŇāadowńÖ ParamValueArray[2]). JeŇľeli zostanie tam znaleziona wartoŇõńá inna niŇľ 255 (ta staŇāa umownie oznacza brak wskazania), to stanowi to dowińÖzanie (index) do tablicy identyfikatorów moduŇāów wyŇõwietlajńÖcych (EEBlock.SubDeviceID) i implikuje wygenerowanie odpowiedniego polecenia wysŇāanego poprzez lokalnńÖ magistralńô RS485 do zespoŇāu moduŇāów wyŇõwietlajńÖcych dane.
Nie ma ograniczenia, by dany parametr pomiarowy mógŇā byńá zaprezentowany na jednym wyŇõwietlaczu, stńÖd pole struktury o nazwie SubDeviceLink jest tablicńÖ. W ten sposób odebranie kaŇľdych danych pomiarowych, które sńÖ przewidziane do wyŇõwietlania, spowoduje odŇõwieŇľenie kaŇľdego moduŇāu wyŇõwietlajńÖcego zwińÖzanego z mierzonńÖ danńÖ wielkoŇõcińÖ. Pozostaje wyjaŇõnińá, skńÖd biorńÖ sińô odpowiednie wartoŇõci w tablicy SubDeviceLink.
Za to odpowiedzialna jest funkcja aktywowana w wyniku naciŇõnińôcia okreŇõlonego przycisku klawiatury, której postańá prezentuje listing 5. ZaŇāóŇľmy, Ňľe zostaŇā naciŇõnińôty przycisk dajńÖcy kod StandKey0Code. Dzińôki temu zostanie przeszukana tablica w bloku konfiguracyjnym (EEBlock.KeyCommTable w wyniku wywoŇāania funkcji LocateKeyCommand, patrz rysunek 10), która zawiera zestawienie kodu klawisza, identyfikatora parametru oraz identyfikatora moduŇāu wyŇõwietlajńÖcego.
MoŇľe sińô zdarzyńá, Ňľe w odpowiedniej tablicy nie zostanie znaleziony poszukiwany element. W takim przypadku nic sińô nie bńôdzie dziaŇāo, nie wniesie to Ňľadnych dalszych dziaŇāaŇĄ w programie. W przeciwnym wypadku zostaje zmodyfikowana lista SubDeviceLink (rysunek 11) w wyniku wywoŇāania funkcji CreateNewAssociation.
Ta funkcja „zauwaŇľy”, Ňľe kod klawisza SK0 wystńôpuje w powińÖzaniu zmiennej T01 i T02 odpowiednio z moduŇāem SCR01 i SCR02. Prowadzi to do koniecznoŇõci modyfikacji elementów tablicy SubDeviceLink. PrzykŇāadowo, jeŇľeli T01 znajduje sińô w tablicy EEBLOCK.DisplParamDescr na indeksie 2, to równieŇľ na indeksie 2 w tablicy ParamValueArray w polu struktury o nazwie SubDeviceLink naleŇľy zmodyfikowańá jakikolwiek wolny element (zawierajńÖcy wartoŇõńá 255), by wskazaŇā na odpowiedni element tablicy identyfikatorów moduŇāów wyŇõwietlajńÖcych.
PozostaŇāe „chwyty” w programie byŇāy juŇľ opisane przy okazji innych moduŇāów, wińôc nie ma potrzeby ich powielania. ModuŇā sterowania wyŇõwietlaniem danych pomiarowych rozpoznaje polecenia (interfejs RS232) wyszczególnione w tabeli 1 (dostńôpnej w Elportalu).
Po uruchomieniu i zaprogramowaniu moduŇāu naleŇľy go odpowiednio skonfigurowańá. SzczegóŇāy bńôdńÖ opisane w drugiej czńôŇõci.