
Układ można podzielić na dwie części: układ kontrolera i układ wskaźnika.
Układ sterownika automatycznej pompy wody
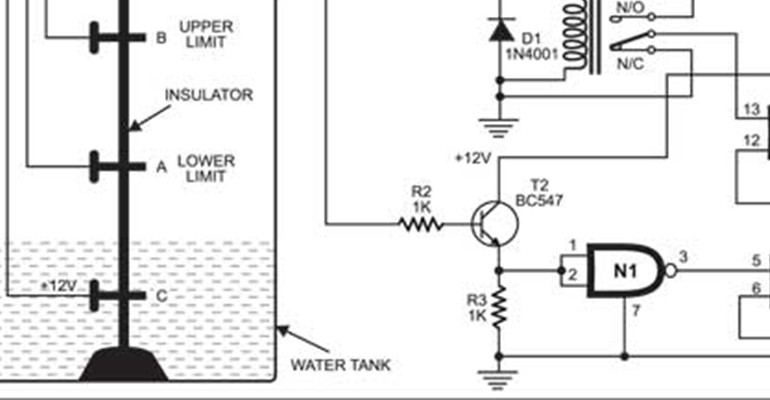
Rysunek 1 przedstawia układ sterownika. Weźmy pod uwagę dwie sondy referencyjne "A" i "B" wewnątrz zbiornika, gdzie "A" jest sondą dolnej granicy, a "B" jest sondą górnej granicy. Zasilanie 12 V DC podawane jest na sondę C, która jest granicą minimalnej ilości wody zawsze przechowywanej w zbiorniku.
Dolny limit 'A' jest podłączony do bazy tranzystora T1 (BC547), którego kolektor jest podłączony do zasilania 12 V, a emiter jest podłączony do przekaźnika RL1. Przekaźnik RL1 jest podłączony do pinu 13 bramki NAND N3.
Analogicznie sonda górnego limitu "B" jest podłączona do bazy tranzystora T2 (BC547), którego kolektor jest podłączony do zasilania 12 V, a emiter jest podłączony do pinów 1 i 2 bramki NAND N1 oraz do masy poprzez rezystor R3. Wyjście 4 bramki NAND N2 jest podłączone do pinu 12 bramki NAND N3. Wyjście N3 połączone jest z pinem wejściowym 6 bramki N2 i bazą tranzystora T3 poprzez rezystor R4. Przekaźnik RL2 podłączony do emitera tranzystora T3 służy do napędzania silnika.
Działanie układu
Jeżeli zbiornik jest napełniony poniżej sondy A, tranzystory T1 i T2 nie przewodzą, a na wyjściu N3 pojawia się stan wysoki. To wysokie napięcie na wyjściu powoduje, że przekaźnik RL2 napędza silnik, który zaczyna pompować wodę do zbiornika.
Gdy zbiornik jest napełniony powyżej sondy A, ale poniżej sondy B, woda w zbiorniku dostarcza napięcie bazowe do tranzystora T1 i przekaźnik RL1 jest zasilany, co powoduje, że pin 13 bramki N3 jest w stanie wysokim. Jednak woda w zbiorniku nie dostarcza napięcia bazowego do tranzystora T2, więc ten nie przewodzi, a układ logiczny zbudowany wokół bramek NAND N1 i N2 podaje na styk 12 bramki N3 sygnał niski. Rezultat jest taki, że na wyjściu N3 pozostaje stan wysoki i silnik nadal pompuje wodę do zbiornika.
Kiedy zbiornik jest napełniony do poziomu sondy B, woda w zbiorniku nadal dostarcza napięcie bazowe do tranzystora T1 i przekaźnik RL1 jest wzbudzony, aby pin 13 bramki N3 był w stanie wysokim. W tym samym czasie woda w zbiorniku również dostarcza napięcie bazowe do tranzystora T2, a układ logiczny zbudowany wokół bramek NAND N1 i N2 wyprowadza stan wysoki na styk 12 bramki N3. Rezultatem jest to, że wyjście na pinie 11 bramki N3 przechodzi w stan niski i silnik przestaje pompować wodę do zbiornika.
Gdy poziom wody spadnie poniżej sondy B, ale powyżej sondy A, woda w zbiorniku nadal dostarcza napięcie bazowe do tranzystora T1 i przekaźnik RL1 pozostaje wzbudzony, aby pin 13 bramki N3 był w stanie wysokim. Jednak tranzystor T2 nie przewodzi, a układ logiczny zbudowany wokół bramek NAND N1 i N2 wyprowadza stan wysoki na pin 12 bramki N3. W wyniku tego wyjście N3 pozostaje niskie i silnik pozostaje zatrzymany.
Gdy poziom wody spadnie poniżej sondy A, oba tranzystory T1 i T2 nie przewodzą. Bramka NAND N3 daje wyjście wysokie do wysterowania przekaźnika RL2 i silnik ponownie zaczyna pompować wodę do zbiornika.
Wskaźnik
Rysunek 2 przedstawia układ wskaźnikowo-monitorujący. Składa się on z pięciu diod LED, których świecenie sygnalizuje poziom wody w zbiorniku podwieszanym. Ponieważ woda jest zasilana napięciem 12 V u podstawy zbiornika, tranzystory od T3 do T7 otrzymują napięcie bazowe i przewodzą, co powoduje świecenie diod LED (od LED5 w dół do LED1).
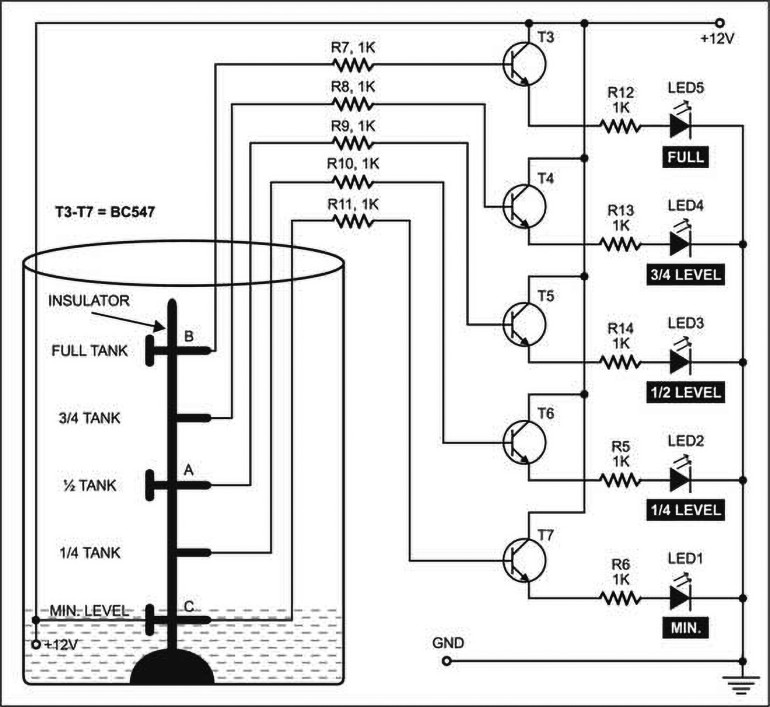
Gdy woda w zbiorniku osiągnie minimum na poziomie C, tranzystor T7 przewodzi i dioda LED1 świeci. Gdy poziom wody w zbiorniku wzrośnie do jednej czwartej zbiornika, tranzystor T6 przewodzi, a diody LED1 i LED2 świecą. Gdy poziom wody wzrośnie do połowy zbiornika, tranzystor T5 przewodzi, a diody LED1, LED2 i LED3 świecą. Gdy poziom wody wzrośnie do 3/4 zbiornika, tranzystor T4 przewodzi, a diody LED1 do LED4 świecą. Gdy zbiornik jest pełny, tranzystor T3 przewodzi i wszystkie pięć diod LED świeci. Tak więc na podstawie świecenia diod LED można poznać poziom wody w zbiorniku (patrz tabela). Diody LED można zamontować w dowolnym miejscu w celu łatwego monitorowania.
Uwaga: Użytkownik może regulować poziom wody w zbiorniku poprzez zmianę wysokości sond A i B. Podstawa i śruby regulacyjne powinny być izolowane, aby uniknąć zwarcia.
Ten artykuł został po raz pierwszy opublikowany 3 października 2004 r. i został zaktualizowany 10 czerwca 2019 r.