- serwomechanizm SG90,
- czujnik CJVL53L0XV2,
- Arduino Uno,
- nakrętka 4 mm × 2,
- śruba o średnicy 4 mm i długości 25 mm,
- nakrętka 2 mm × 4,
- śruba o średnicy 2 mm i długości 10 mm × 4,
- drut stalowy o średnicy 1 mm około 10 cm,
- piłeczka do tenisa stołowego.
Przybliżę czytelnikom sposób, w jaki mogą sami zbudować własny egzemplarz. Składa się on z kilku łatwo dostępnych podzespołów. Dzięki zastosowaniu powszechnie dostępnego druku 3D sama budowa także nie jest trudna. Na końcu zaprezentuję eksperymenty, jakie wykonałem, a działanie samego modelu można obejrzeć na filmie [1].
Mechanika
Dla sprawdzenia koncepcji, najpierw wykonałem prosty model z kartonu. Gdy przeszedł on pozytywnie wstępne testy, zaprojektowałem docelowy model. Część mechaniczna składa się z dwóch elementów. Zostały one zaprojektowane w programie Oneshape [2]. Obydwa z nich zostały wydrukowane na drukarce Prusa Mini. Pliki STL znajdują się w repozytorium [3] w folderze model.
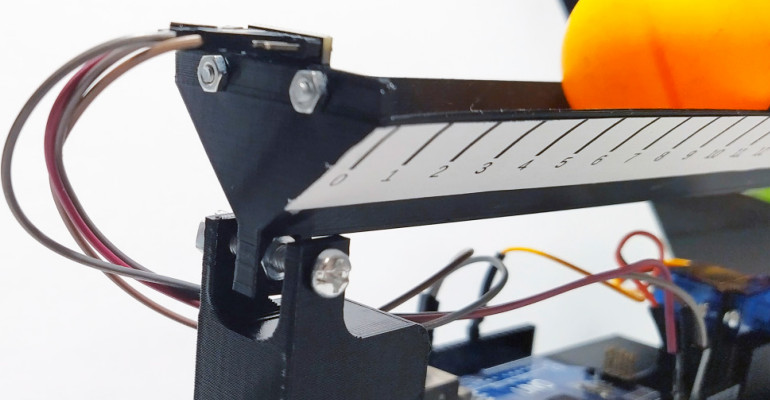
Pierwszym elementem mechanicznym jest belka, po której toczy się kulka. W początkowej części widzimy otwory montażowe dla czujnika odległości. Pod nimi znajduje się miejsce do zamocowania nakrętki, która będzie osią obrotu belki. W drugiej części widoczny jest otwór o średnicy 1 mm na ramię połączone z serwomechanizmem. Została ona wydrukowana z grubością warstwy 0,15 mm.
Drugi element to podstawa. Mieszczą się na niej podpora dla belki oraz mocowania dla serwomechanizmu i płytki Arduino Uno. Początkowo sama podpora była cieńsza, jednak powodowało to jej wygięcie w czasie druku. Ponieważ nie zawiera ona drobnych detali, została wydrukowana z grubością warstwy 0,25 mm.