



Podstawowym wymogiem dla sterownika silnika bipolarnego jest możliwość odwrócenia kierunku przepływu prądu w każdym z dwóch uzwojeń. Osiąga się to za pomocą pary obwodów „mostka H”.
Mostek H
W zasadzie zaprojektowanie mostka typu H jest stosunkowo proste, to znaczy do momentu, kiedy się tego nie spróbuje i nie zniszczy wielu MOSFET-ów. W najprostszej formie, mostek H to po prostu cztery półprzewodnikowe przełączniki ułożone w konfiguracji „H”, która jest zapewne znana wielu czytelnikom. Układ mostka H – topologię obwodu, którą można znaleźć nie tylko w sterownikach silników krokowych, ale również jest szeroko stosowana do odwracania kierunku obrotów w sterownikach silników prądu stałego.
Przełączniki high-side łączą się z dodatnią szyną zasilania, a przełączniki low-side łączą się z szyną ujemną lub masą, więcej na ten temat później. Aby silnik prądu stałego obracał się w jednym kierunku, należy zamknąć lewy górny i prawy dolny przełącznik. Aby odwrócić kierunek, zamknij prawy górny i lewy dolny przełącznik. Ta sama metodologia jest stosowana do odwrócenia prądu w uzwojeniu silnika krokowego.
Zamieńmy przełączniki na tranzystory MOSFET, typu p dla strony wysokiej i typu n dla strony niskiej. MOSFETY typu N są preferowane, ponieważ mają zwykle mniejszą rezystancję włączania, co oznacza mniejsze straty mocy i niższą temperaturę pracy. Niestety, zastosowanie typu n dla strony wysokiej nie jest proste, ponieważ napięcie bramki musi przekraczać napięcie zasilania mostka. Można to jednak osiągnąć za pomocą obwodu pompy ładunkowej DC–DC, aby podnieść napięcie powyżej dodatniej szyny zasilania.
Istnieje tu potencjalny problem. Gdybyś zamknął oba prawe lub oba lewe przełączniki, to doszłoby do zwarcia w zasilaniu silnika. Oczywiście można zastosować środki, które – teoretycznie – zapobiegną temu. Środki te mogłyby być zaimplementowane w logice dyskretnej lub oprogramowaniu, ale zwarcie nadal mogłoby się zdarzyć.
W energoelektronice używamy terminu „shoot-through” dla sytuacji, gdy oba MOSFET-y po tej samej stronie mostka są chwilowo zamknięte w tym samym czasie, nawet tylko przez kilka mikrosekund stanu przejściowego podczas przełączania tranzystorów. Otwarcie i zamknięcie przełączników MOSFET może nakładać się na siebie z powodu opóźnień spowodowanych stałymi czasowymi wynikającymi z impedancji bramki, pojemności bramki, prądu sterowania bramki, a nawet związanymi z projektem płytki drukowanej. Aby temu zapobiec, wprowadza się czas martwy, dzięki któremu załączenie tranzystora jest opóźnione o okres dłuższy niż czas wyłączenia. Oznacza to, że podczas tych martwych czasów wszystkie cztery MOSFET-y będą wyłączone. Jednak rozwiązanie problemu „shoot- through” prowadzi do nowego problemu – przy otwartych wszystkich przełącznikach nie ma którędy płynąć prąd silnika (prąd wynikający z zaniku pola magnetycznego w uzwojeniu). To spowoduje gwałtowny wzrost napięcia w cewce silnika, który potencjalnie może przekroczyć napięcie znamionowe MOSFET-ów i spowodować ich awarię – często dramatyczną awarię z dymem, a nawet płomieniami na MOSFET-ach dużej mocy. (Mówiłem, że projektowanie i działanie mostków H jest zdradliwe!)
Musimy zapewnić, aby przez cały czas istniała droga dla przepływu prądu w cewce i jest to osiągane za pomocą „wewnętrznych” diod MOSFET-ów; lub za pomocą zewnętrznych diod, jeśli używamy tranzystorów bipolarnych. Warto zauważyć, że diody wewnętrzne MOSFET mogą nie być wystarczająco szybkie lub zdolne do odprowadzenia wystarczającej ilości energii prądów uzwojenia podczas okresów martwych, dlatego w konstrukcjach MOSFET mogą być wymagane również diody zewnętrzne.
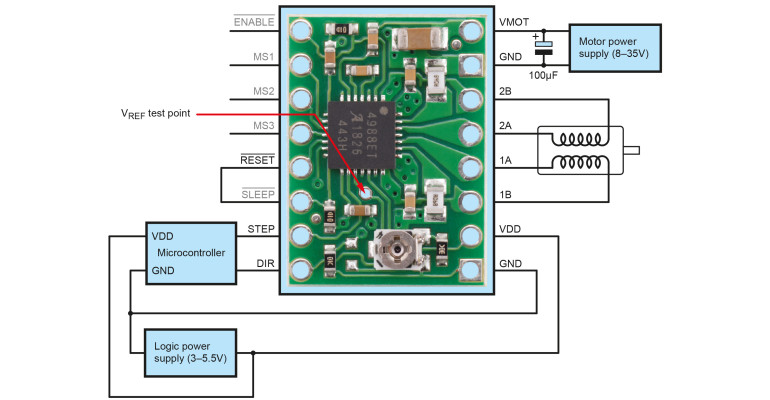
Istnieją jeszcze inne problemy projektowe dla mostka H, ale wykraczają one poza ramy tego artykułu. Celem rozwodzenia się nad pułapkami w projektowaniu mostków H jest pokazanie, że pomimo ich powierzchownej prostoty nie są one łatwe do zbudowania i niezawodnego działania. Odpowiedzią jest korzystanie z gotowych sterowników silników krokowych – ich kluczową zaletą jest to, że problemy złożonych zależności czasowych są już załatwione wewnątrz sterownika. Możesz skupić się na aplikacji sterownika silnika i nie martwić się o projekt mostków.





















