Napędy robotów medycznych
Jeśli mielibyśmy to szczęście, by móc zajrzeć do wnętrza czołowych robotów medycznych stosowanych w szpitalach na całym świecie, znaleźlibyśmy tam naprawdę pokaźne portfolio rozmaitych silników elektrycznych. Sporym sukcesem w tym zakresie może pochwalić się m.in. firma maxon: do każdego z robotów, należących do serii da Vinci S HD Surgical System, trafiło ponad 30 wyprodukowanych przez nią silników, w tym napędy ze statorami wykonanymi na bazie metali ziem rzadkich (seria RE) oraz rotorami pozbawionymi żelaza, co niweluje problem tzw. coggingu (tj. "przeskakiwania" rotora pomiędzy kolejnymi pozycjami, jak w typowym silniku krokowym). W materiałach reklamowych, dostępnych na stronie maxon, znajdujemy odniesienie do silników komutatorowych RE 25, co ciekawe - zarówno w wersji z enkoderem, jak i bez niego. W robotach da Vinci znalazły także zastosowanie napędy o niemal dwukrotnie mniejszej średnicy (równej 13 mm), należące do serii RE 13 i wyposażone w przekładnie planetarne oraz enkodery magnetyczne. Inżynierowie Intuitive Surgical - wytwórcy robotów da Vinci - skorzystali także z większych napędów RE 35, tym razem wyposażonych w enkodery innego producenta. Warto dodać, że mówimy tutaj tylko i wyłącznie o najmniejszych silniczkach, stosowanych do napędu końcówek roboczych oraz (być może) zadajników - trudno bowiem oczekiwać, żeby producent upublicznił dalsze szczegóły dotyczące konstrukcji flagowej serii robotów chirurgicznych.
Napędy marki maxon znalazły także zastosowanie w prototypach polskich robotów chirurgicznych Robin Heart 3. Z literatury branżowej - w tym licznych publikacji, poświęconych rodzimym konstrukcjom mechatronicznych "chirurgów" - dowiadujemy się, że w napędach narzędzi RH 3 znalazły się ultra-kompaktowe silniki bezszczotkowe z serii EC 6, wyposażone w przekładnie o przełożeniu 1:221 - o tym, z jak maleńkimi i precyzyjnymi napędami mamy tutaj do czynienia, niech świadczy ich rysunek wymiarowy. Napędy maxon trafiły ponadto do zadajników polskiego robota kardiochirurgicznego, gdzie odpowiadają za sprzężenie haptyczne - w tym przypadku zastosowanie znalazły niskoprofilowe napędy BLDC z serii EC 30 Flat i EC 22.
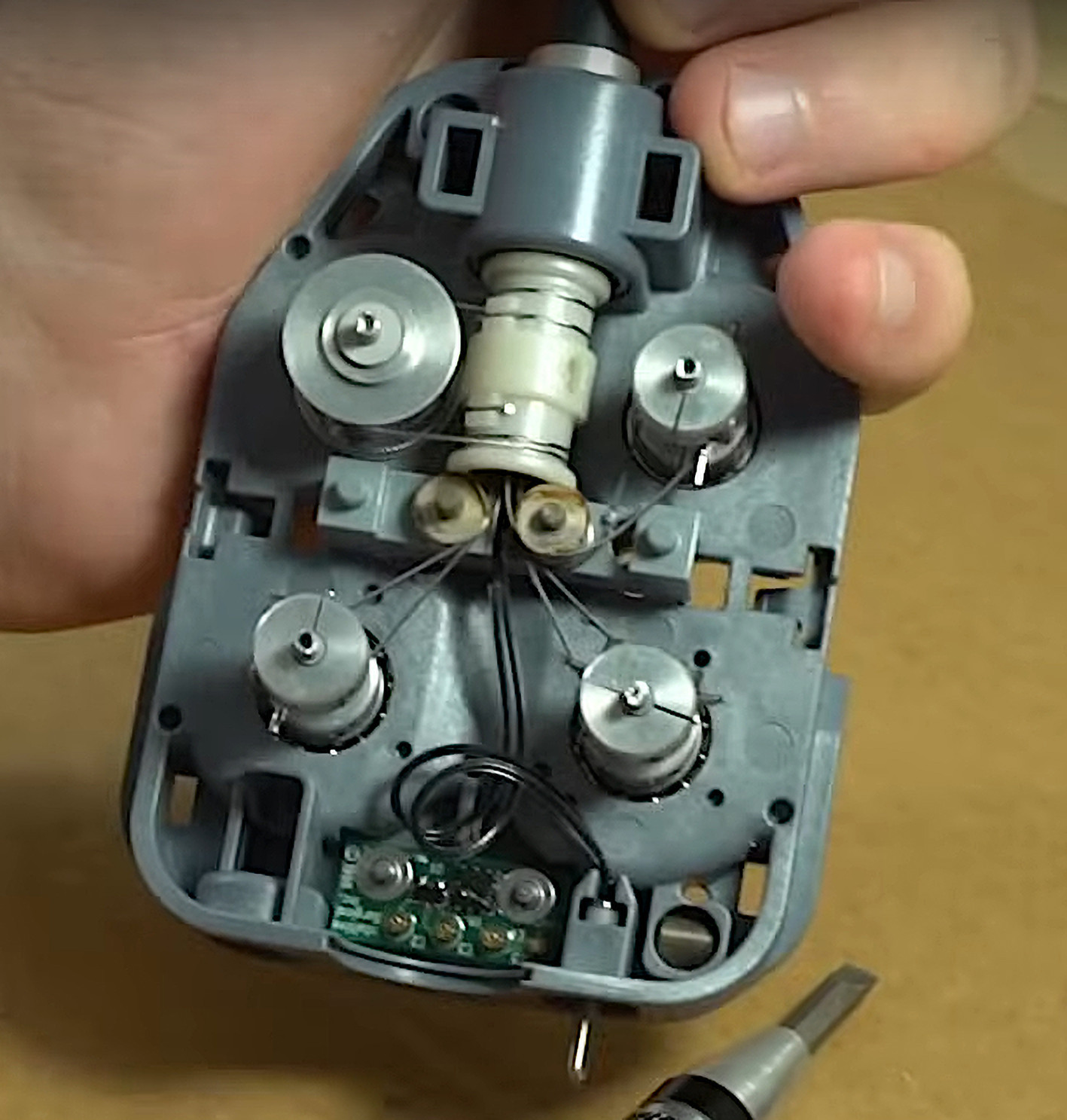
Konstrukcje narzędzi robotów chirurgicznych mogą być realizowane na dwa sposoby: pierwszy z nich opiera się na zastosowaniu specjalnej głowicy, zawierającej sprzęgła i układ przeniesienia napędu, współpracujący z umieszczoną na końcu metalowej tulei końcówką roboczą. Takie rozwiązanie znakomicie obniża koszty wymiany narzędzi, ułatwia także spełnienie wymogów dotyczących sterylizacji (wysoka temperatura i wilgotność, w przypadku sterylizacji w autoklawie). Na fotografii można zobaczyć wnętrze głowicy narzędzia robota da Vinci - wszystkie cztery przeguby są poruszane za pośrednictwem stalowych linek i specjalnych rolek, zaś napędy rolek pozostają na stałe wmontowane w ramię robota.
W niektórych przypadkach konieczne (lub przynajmniej wskazane z przyczyn natury konstrukcyjnej) jest wbudowanie silników wprost w obudowę narzędzia. Taki napęd musi rzecz jasna "przeżyć" pewną liczbę cykli autoklawowania, bez uszczerbku dla izolacji uzwojenia, łożysk i wszelkich pozostałych elementów silnika. I tutaj także z pomocą przychodzą najbardziej zaawansowani producenci napędów elektrycznych - przykładowo, firma Portescap opracowała serię SM, obejmującą kompaktowe silniki bezszczotkowe, zdolne do przetrwania ponad 500 cykli sterylizacji. Napędy są dostępne w wersjach o średnicy zewnętrznej od 0,5 cala do 1,23 cala.
Interesującą propozycję dla konstruktorów robotów chirurgicznych zaprezentowała firma Kollmorgen. Seria bezramkowych silników TBM2G oferuje znaczne ułatwienie w budowie przegubów robotycznych ramion, pozwala bowiem na zaoszczędzenie znacznej ilości miejsca w obudowie manipulatora, zostawiając przy tym przestrzeń wewnątrz rotora, np. na przeprowadzenie okablowania do dalszych członów ramienia. Konstrukcja napędu bezpośredniego (Direct Drive) istotnie upraszcza także budowę mechaniki robota, eliminując konieczność stosowania ciężkich i potencjalnie awaryjnych przekładni oraz systemów przeniesienia napędu, niezbędnych w przypadku manipulatorów sterowanych za pomocą konwencjonalnych serwomotorów.