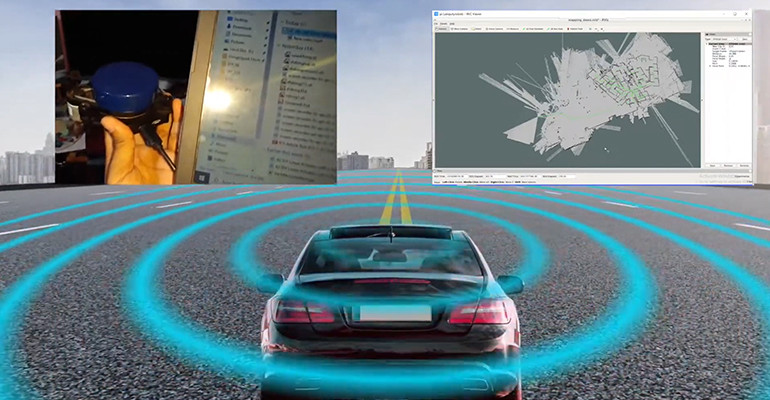

Dlatego w dzisiejszym projekcie zajmiemy siؤ™ przeciwdziaإ‚aniem temu problemowi poprzez opracowanie taniego systemu do tworzenia map إ›rodowisk wewnؤ™trznych w czasie rzeczywistym. Dziؤ™ki temu robot bؤ™dzie mógإ‚ dziaإ‚aؤ‡ bez kolizji i nawigowaؤ‡ omijajؤ…c wszelkie przeszkody.
Aby rozpoczؤ…ؤ‡ pracؤ™ nad projektem, naleإ¼y zaopatrzyؤ‡ siؤ™ w nastؤ™pujؤ…ce elementy:
Przygotowanie Hector Slam
Przed instalacjؤ… Hector SLAM, najpierw zainstaluj oprogramowanie do obsإ‚ugi robota (ROS).
Przeczytaj to, aby dowiedzieؤ‡ siؤ™ jak to zrobiؤ‡.
Po przygotowaniu إ›rodowiska ROS, zainstaluj sterowniki i SDK LiDAR. Jeإ›li uإ¼ywasz RPI Lidar, to nie musisz wykonywaؤ‡ tych kroków. Zamiast tego, moإ¼esz przejإ›ؤ‡ do instalacji Hector SLAM. Jeإ›li jednak uإ¼ywasz Lidara YD, to kontynuuj poniإ¼sze kroki.
Instalacja LIDAR SDK
git clone https://github.com/YDLIDAR/YDLidar-SDK
cd YDLidar-SDK/build
cmake .
make
sudo make installNastؤ™pnie naleإ¼y utworzyؤ‡ przestrzeإ„ roboczؤ… ROS dla LiDARa, a nastؤ™pnie zainstalowaؤ‡ sterownik ROS za pomocؤ… poniإ¼szych poleceإ„ w LXTerminalu.
mkdir -p ~/ydlidar_ws/src
cd ~/ydlidar_ws
catkin_make
echo „source ~/ydlidar_ws/devel/setup.bash” >> ~/.bashrc
source ~/.bashrc
cd ~/ydlidar_ws/src/ydlidar_ros_driver/startup
sudo chmod +x initenv.sh
sudo sh initenv.shInstalacja Hector Slam
Otwórz nowy LXTerminal i wykonaj nastؤ™pujؤ…cؤ… komendؤ™, aby zainstalowaؤ‡ Hector SLAM.
sudo apt-get install ros-kinetic-hector-slam
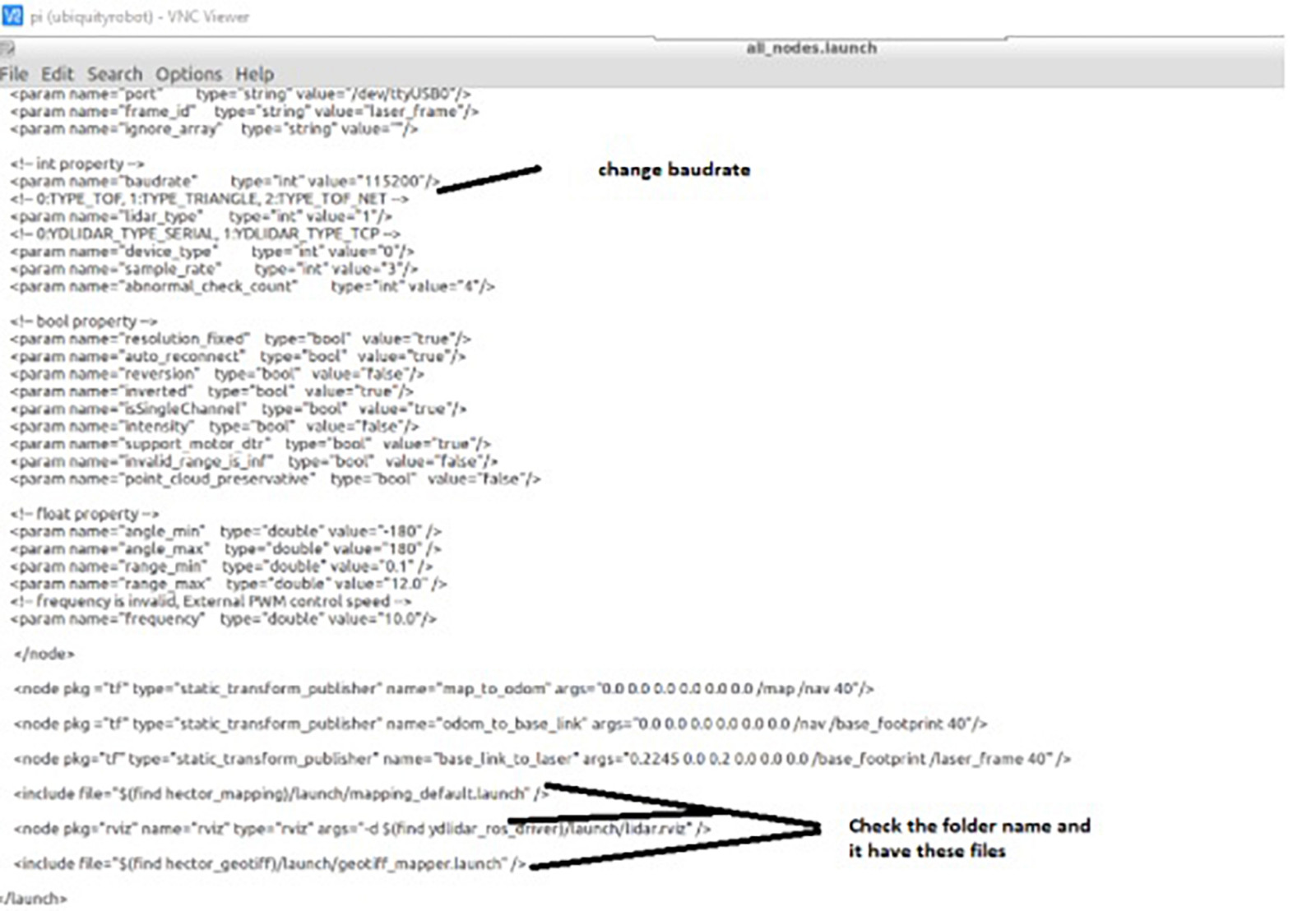
wget https://storage.googleapis.com/google-code-archive-downloads/v2/code.google.com/tu-darmstadt-ros-pkg/Team_Hector_MappingBox_RoboCup_2011_Rescue_Arena.bagHector SLAM jest teraz gotowy. Zmodyfikuj niektóre ustawienia LiDAR w pliku startowym lidaru dla pozycjonowania w pomieszczeniach. Aby to zrobiؤ‡, najpierw przejdإ؛ do obszaru roboczego YD Lidar i otwórz plik src. Nastؤ™pnie otwórz plik all_nodes.launch i zmieإ„ parametry zgodnie z poniإ¼szym rysunkiem.
Testowanie
Podإ‚ؤ…czamy lidar YD do USB pإ‚yty RPi, zasilamy go i uzyskujemy jego pulpit GUI.
W celu pozycjonowania robota wewnؤ…trz budynku, uruchom nastؤ™pujؤ…cؤ… komendؤ™ w LXTerminal.
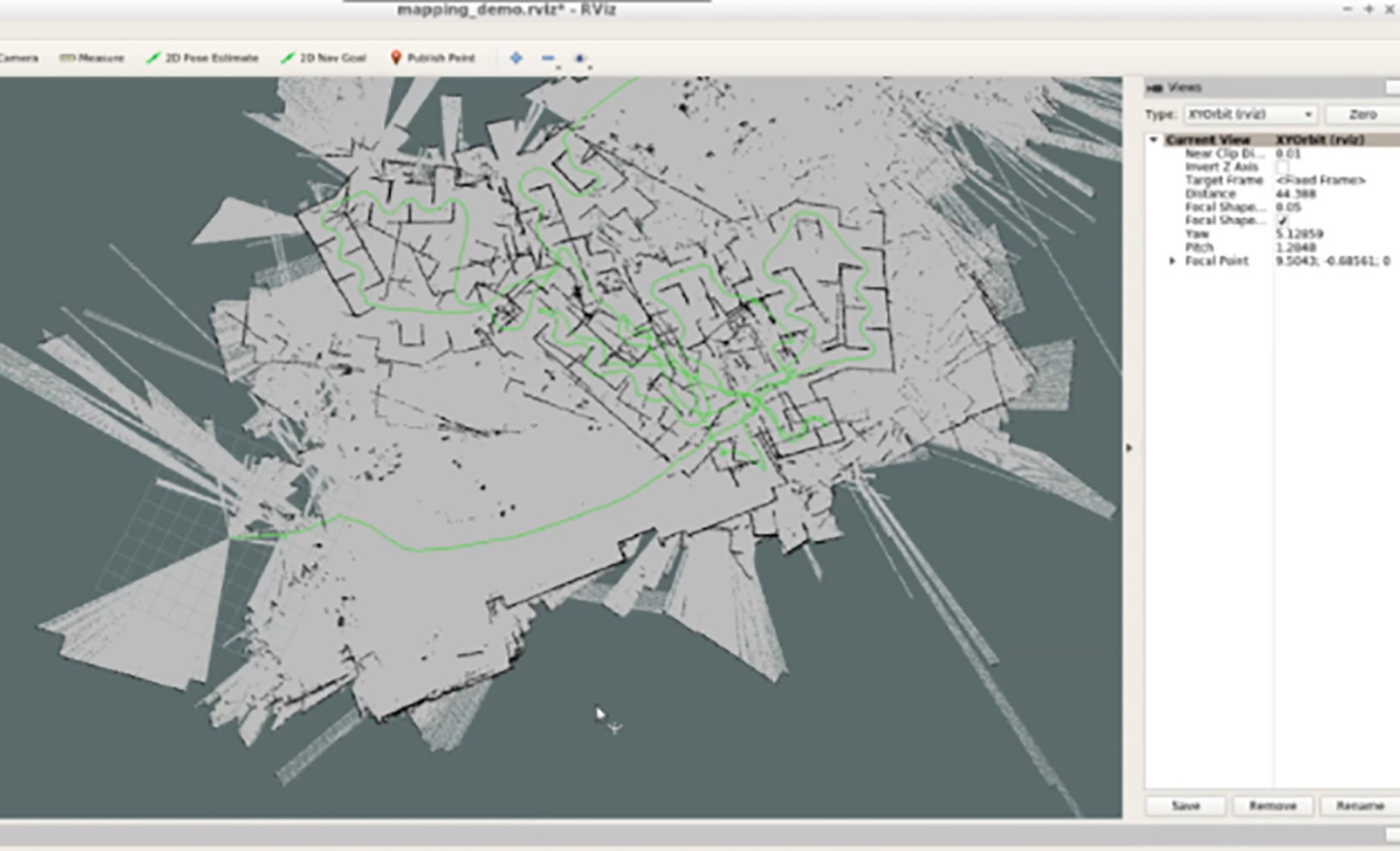
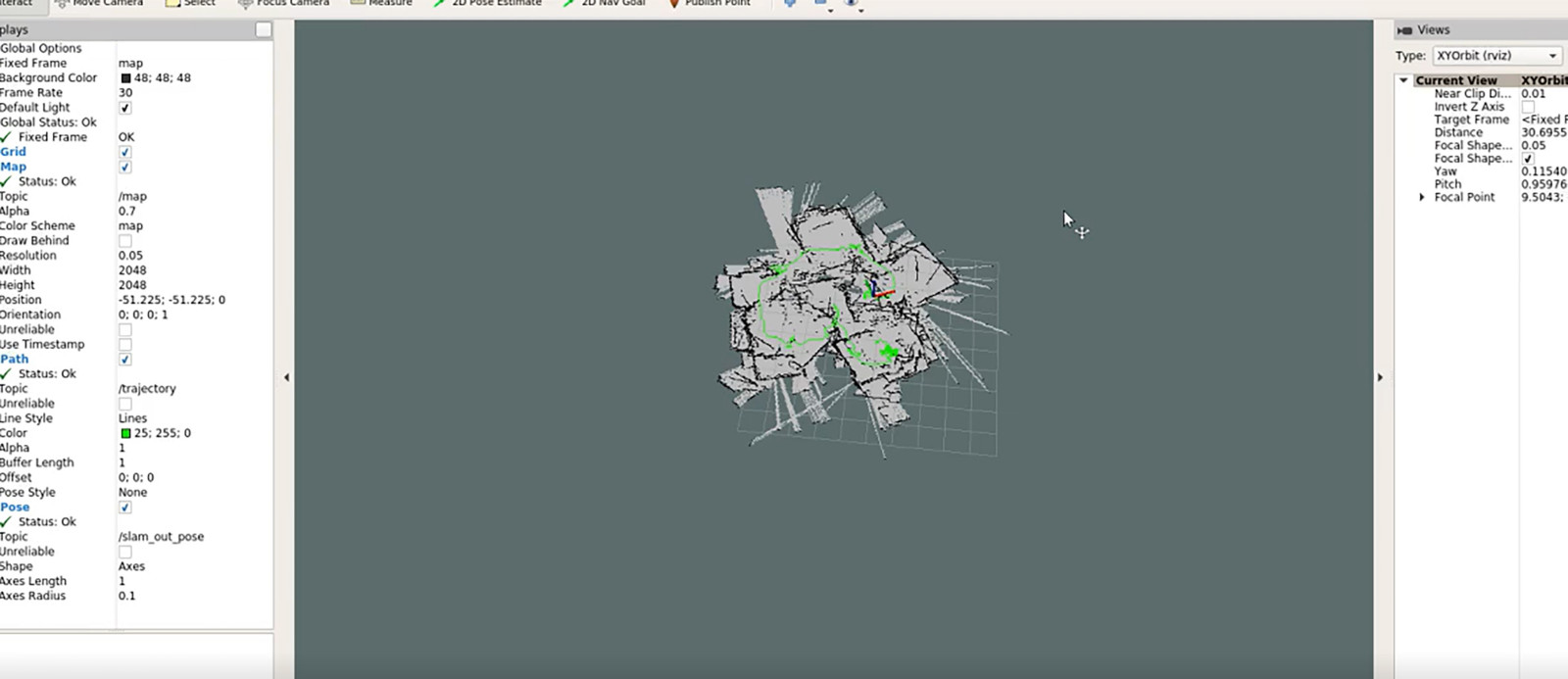
roslaunch ydlidar_ros_driver all_nodes.launchOtrzymasz wtedy mapؤ™ aktualnej pozycji robota i jego otoczenia.

Aby przetestowaؤ‡ Hector SLAM i uzyskaؤ‡ mapؤ™ w czasie rzeczywistym, wykonaj nastؤ™pujؤ…ce polecenia
roslaunch hector_slam_launch tutorial.launch
rosbag play Team_Hector_MappingBox_RoboCup_2011_Rescue_Arena.bag –clock
rostopic pub syscommand std_msgs/String „savegeotiff”