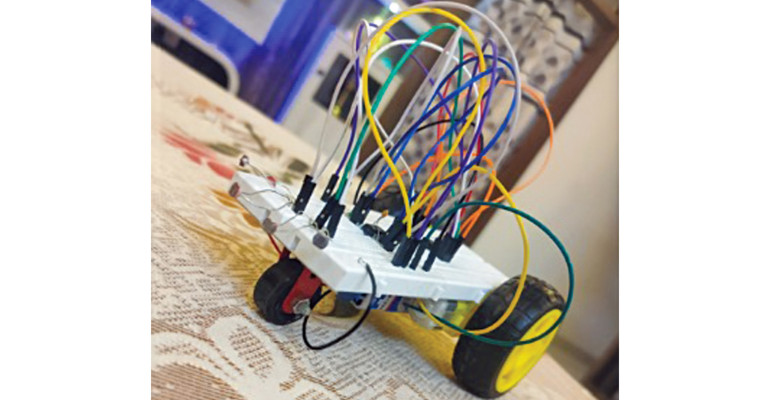

Układ został zmontowany prowizorycznie na uniwersalnej płytce stykowej.
Autor traktuje swój projekt jako pierwszy krok w pasjonujący świat robotyki. Jego prostota konstrukcja bazuje na dwóch elementach. Oczami robota są elementy LDR (ang. Light Dependent Resistor), czyli fotorezystory. Jako elementy wykonawcze zastosowano dwa popularne (nieśmiertelne i zawsze na topie) timery typu 555. Zmiany natężenia oświetlenia skutkują zmianami rezystancji LDR użytych w obwodach z timerami 555 co przekłada się na generowane przebiegi, sterujące silnikami umocowanymi na osiach kół robota. Tak prosta konstrukcja pozwala na adaptację ruchów robota do warunków otaczającego oświetlenia. Budowa i zabawa robotem opisanym w bieżącym projekcie DIY pozwoli na głębsze zrozumienie tematyki sensorów, timerów i sterowania elementami mechanicznymi w postaci silników. To podejście pozwoli połączyć teorię z praktycznym zastosowaniem w świecie robotyki.
Opis układu i jego działanie
Robot jest układem elektro-mechanicznym, są więc też elementy których nie obejmuje schemat ideowy. Najważniejszymi elementami są dwa timery 555 (IC1 i IC2), dwa silniki prądu stałego (M1 i M2) i dwa fotorezystory (LDR1 i LDR2). Ponadto tylko kilka rezystorów oraz źródło zasilania, którym może być bateria 9 V. Zasilanie bateryjne zapewnia pełną mobilność robotowi, natomiast tymczasowo lub nawet docelowo w niektórych zastosowaniach może być to zasilacz o napięciu stałym 9 V.
Ideą przyświecającą konstrukcji robota aktywowanego światłem jest stworzenie wszechstronnego i adaptacyjnego systemu robotycznego, który, jak wcześniej wspomniano, może reagować na zmiany warunków oświetlenia. Sensory światła (tu fotorezystory) są wykorzystane do umożliwienia robotowi postrzegania otoczenia i podejmowania prostych decyzji.
Fotorezystory pracują w parze z rezystorami R1 i R2, tworząc dzielnik napięcia którym wyzwalany jest timer 555. Charakterystyka fotorezystorów LDR wykazuje spadek rezystancji wraz ze wzrostem natężenia światła. Zatem, na wspomnianym dzielniku uzyskamy maksymalne napięcie przy minimalnym lub braku oświetlenia, oraz napięcie minimalne przy silnym oświetleniu. Charakterystykę tego elementu oraz warunków (intensywności oświetlenia) w jakich będzie pracował należy odpowiednio sparować z wartością rezystorów R1 i R2. Wymogi napięcia z dzielnika muszą być dostosowane do poziomów wyzwalania i resetu przerzutnika wewnątrz układu 555, a te ustalone są wewnętrznym dzielnikiem napięcia na 1/3 i 2/3 zasilania. Układ 555 skonfigurowano w sposób typowy dla multiwibratora astabilnego, jednak tutaj pracuje on jako przełącznik. Zatem, praca naszego robota jest bardzo prosta: 555 ma dwa wyjścia Q i DIS, które pracują współbieżnie. Różnica polega na tym, iż Q ma wyjście dwustanowe, a DIS to wyjście typu otwarty kolektor, a więc, albo są oba w stanie niskim, albo gdy Q jest w stanie wysokim, to DIS wykazuje stan wysokiej impedancji. Jeśli przerzutnik zostanie raz wyzwolony, a następnie napięcie na (połączonych) nóżkach 2 i 6 pozostaje w przedziale 1/3 do 2/3 zasilania, wówczas wyjście pozostanie dalej w stanie wysokim. Tak szeroka strefa „nieczułości” powoduje, że np. jeśli napięcie pinów 2 i 6 utrzymuje się w okolicach połowy zasilania, to silnik podlegający danemu driverowi pozostaje załączony. Silnik zostanie wyłączony, gdy napięcie dzielnika rezystancyjnego wzrośnie powyżej progu dwóch trzecich zasilania, co nastąpi przy odpowiednio słabym oświetleniu fotorezystora. Dla kolejnego włączenia silnika potrzebne jest odpowiednio silne oświetlenie elementu LDR.