Nietoperze korzystają z systemu echolokalizacji. Emitują dźwięk o wysokich częstotliwościach, który odbija się od przeszkód, owadów etc. i wraca do ich czułych uszu. Pozwala to na „widzenie” w ciemności. Charakter emitowanych dźwięków pozwala zidentyfikować gatunek nietoperza, nawet, jeżeli znajduje się on dosyć daleko od nas. Jest to bardzo istotna informacja dla biologów monitorujących ilość nietoperzy na danym terenie. Analiza ta jest szczególnie przydatna, gdyż może być zautomatyzowana z wykorzystaniem opisanego poniżej prostego klasyfikatora. Dzięki temu, wykorzystując przenośny system oparty o komputer jednopłytkowy Raspberry Pi i dedykowane oprogramowanie możliwe jest wykrywanie i klasyfikowanie nietoperzy w terenie.
Prezentowane urządzenie wykrywające nietoperze może być zasilane z baterii 12 V i może być umieszczone w terenie na kilka dni lub nawet tygodni. Dane są przesyłane, co jakiś czas za pośrednictwem łącza radiowego LoRa. Zasada działania układu jest bardzo prosta – układ nagrywa 30 sekundowe próbki dźwięku i dokonuje jego analizy za pomocą systemu AI. Jeśli system wykryje w sygnale dźwięki charakterystyczne dla nietoperza to zmienia nazwę pliku na zidentyfikowany gatunek, dodaje do niego współczynnik określający pewność identyfikacji i datę. Pozostałe próbki audio są kasowane, by zaoszczędzić miejsce na dysku i zredukować obciążenie interfejsu komunikacyjnego.
Podstawowe cechy urządzenia:
- Mikrofon z pełnym widmem pomiarowym, zdolny do nagrywania dźwięku monofonicznego w jakości 384 kbps,
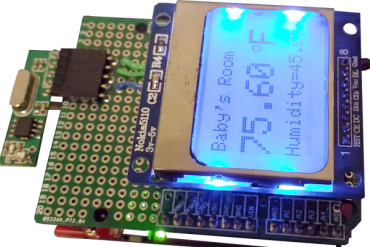
- Rezultaty mogą być wyświetlane w czasie rzeczywistym na dołączonym ekranie LCD, w postaci informacji o zidentyfikowanym gatunku lub jako widmo sygnału,
- Zasilanie z akumulatora 12 V lub dowolnego innego źródła zasilania o napięciu od 6 V do 16 V,
- Oprogramowanie zoptymalizowane pod kątem minimalizacji poboru prądu i wydajności obliczeń, dzięki wykorzystaniu klasyfikacji asynchronicznej,
- Średni czas pracy na 10 ogniwach 1,2 V NiMH typu AA to około 5 godzin,
- System zachowuje dane, nawet, jeżeli pewność detekcji wynosi 1%, ale ustawić można limit danych, po przekroczeniu, którego najgorsze pomiary będą kasowane,
- Możliwość przetwarzania wcześniej zebranych danych i danych z innych źródeł,
- Wykorzystanie w pełni otwartego oprogramowania,
- Możliwość uzupełniania modelu – trenowanie systemu uczenia maszynowego do wykrywania innych gatunków nietoperzy np. z innych obszarów geograficznych.
Potrzebne moduły i elementy
Do zestawienia prezentowanego urządzenia potrzebne będą:
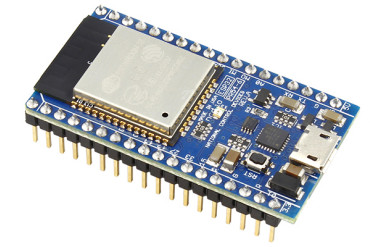
- Raspberry Pi 4 z 4 GB pamięci RAM,
- Obudowa z wentylatorem. Dobrze jest także nakleić radiatory na układach Raspberry Pi,
- Moduł ADC Pi do monitorowania napięcia baterii i napięć zasilających,
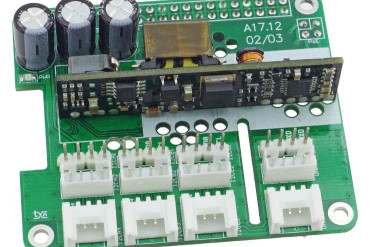
- Płytka ewaluacyjna EVM3683-7-QN-01A do dostarczania 5 V,
- Moduł HAT Dragino LoRa GPS,
- Sensor temperatury i wilgotności Adafruit Si7021,
- Wyświetlacz TFT LCD (800×480) o przekątnej 5” z interfejsem dotykowym,
- Bateria 12 V lub inne podobne źródło zasilania,
- Mikrofon USB UltraMic 384 lub inny o szerokim pasmie (zapewniający jakość 384 kbps) obejmującym ultradźwięki,
- Oporniki 270 kΩ, 3,3 kΩ oraz 48,1 kΩ,
- Wodoodporna obudowa na system,
- Pakiet oprogramowania do środowiska R WavX bioacoustics do analizy i ekstrakcji danych akustycznych nietoperzy,
- Oprogramowanie do klasyfikacji Random Forest.