
- Pomiar częstotliwości VFO z możliwością przesunięcia wyniku pomiaru o dowolną wartość częstotliwości pośredniej.
- Maksymalna częstotliwość mierzona Fmax = 22 MHz (32 MHz dla rezonatora 16 MHz).
- Pomiar napięcia zasilania (stanu akumulatora).
- Odłączenie zasilania, gdy napięcie zasilające obniży się poniżej skonfigurowanej wartości minimalnej, celem zapobieżenia nadmiernego rozładowania i uszkodzenia akumulatora.
- Programowe sterowanie włączaniem / wyłączaniem TRX-a.
- Pomiar napięcia AGC (wskaźnik siły sygnału).
- Wyniki pomiarów prezentowane na tanim 4 cyfrowym wyświetlaczu LED.
- Prosta i tania konstrukcja bazująca na najpopularniejszych elementach elektronicznych.
- Zasilanie 8…12 V DC.
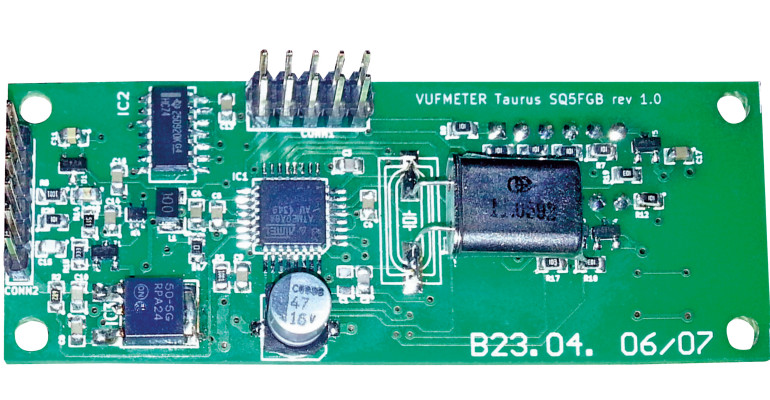
Na łamach EP kilkakrotnie opisywano odpowiednie skale/mierniki częstotliwości do TRX-ów, jednak nie spełniały one moich oczekiwań. Taurus z racji swojej wielkości idealnie pełni funkcję urządzenia przenośnego, zatem dobrze by było, aby sterownik oprócz pomiaru częstotliwości miał też funkcjonalność pomiaru napięcia akumulatora. W ten sposób powstał sterownik/skala częstotliwości TRXCTL o rozszerzonej funkcjonalności, która może być używana również z innymi urządzeniami, np. z transceiverem Antek.
Opis układu
Sercem jest bardzo popularny i nieco już przestarzały mikrokontroler ATmega8 mający 8 kB pamięci Flash, 1 kB pamięci RAM oraz przetwornik A/C o rozdzielczości 10 bitów. W tym zastosowaniu wymagana moc obliczeniowa rdzenia jest niewielka, więc doskonale spełnia on swoją rolę. Do taktowania mikrokontrolera zastosowano zewnętrzny rezonator kwarcowy o częstotliwości 11,0592 MHz (X1). Dodatkowy kondensator C1 służy do dostrojenia rezonatora do częstotliwości nominalnej i powinien być dobrany w zależności od zastosowanego egzemplarza kwarcu. W prototypie wartość pojemności C1 wynosiła 48 pF. Konieczność zastosowania zewnętrznego rezonatora kwarcowego wynika z funkcjonalności pomiaru częstotliwości.
Układ zasilania mikrokontrolera zrealizowano w sposób typowy z użyciem stabilizatora liniowego LM80M05 lub LP2950 (IC3). Do komunikacji z użytkownikiem służy 4-cyfrowy 7-segmentowy wyświetlacz LED (DISP1) o wysokości 14 mm i wspólnej anodzie cyfr, sterowany z multipleksowaniem. Załączanie zasilania anod wyświetlaczy odbywa się za pomocą tranzystorów T2…T5 typu BC807 z uwagi na ograniczony prąd maksymalny pojedynczego portu GPIO mikrokontrolera. Sterowanie poszczególnych segmentów wyświetlacza odbywa się z wykorzystaniem portów mikrokontrolera poprzez rezystory R6…R13 ograniczające prąd poszczególnych segmentów. Do portów PD2 (INT0) i PD3 (INT1) dołączono dwa przyciski służące do obsługi urządzenia. Linie wybrano celowo z uwagi na możliwość wybudzania mikrokontrolera z trybu uśpienia poprzez wciśnięcie przycisku, co jest wykorzystywane przy realizacji funkcjonalności wyłącznika programowego.
Pomiar napięcia zasilającego odbywa się za pomocą rezystancyjnego dzielnika napięcia R2/R3, który jest dołączony do wejścia ADC0 przetwornika A/C. Pomiar napięcia AGC (Automatic Gain Control) odbywa się za pomocą podwajacza napięcia wykonanego na podwójnej diodzie BAT54S (D1). Podwojone napięcie jest doprowadzone do wejścia ADC1 przetwornika A/C. W TRX „Taurus” napięcie AGC występujące na diodach podwajacza 1N4148 ma polaryzację ujemną i dlatego jest konieczne zastosowanie podwajacza dostarczającego napięcie dodatnie.
Pomiar częstotliwości z wykorzystaniem układu czasowo–licznikowego mikrokontrolera jest ograniczony do impulsów prostokątnych o maksymalnej częstotliwości 5,5 MHz i wypełnieniu 50%, natomiast sygnał z generatora VFO jest sygnałem sinusoidalnym o amplitudzie kilkuset mV i kilkukrotnie większej częstotliwości, co powoduje konieczność zastosowania dodatkowego układu formującego impulsy. Sygnał z VFO trafia do wzmacniacza w układzie CE na tranzystorze T1, a następnie jest kierowany do bramki negacji z wejściem Schmitta IC4 (74LVC1G14GW). W wyniku tego na wyjściu otrzymujemy sygnał prostokątny, który jest doprowadzony do wejścia dzielnika zrealizowanego na dwóch przerzutnikach typu „D” układu 74HC74D. Na wyjściu dzielnika otrzymujemy sygnał o 4-krotnie mniejszej częstotliwości, który jest dołączony do wejścia układu czasowo-licznikowego T1 (PD5).
Linia PD6 za pośrednictwem rezystora R20 jest wyprowadzona na złącze zewnętrzne i służy do sterowania zewnętrznym tranzystorem MOSFET, odpowiedzialnym za zasilanie pozostałych komponentów tranceivera. Złącze CONN1 stanowi interfejs ISP w standardzie STK200 służący do programowania mikrokontrolera, natomiast na złącze CONN2 wyprowadzono wszystkie linie zewnętrzne urządzenia.