Urządzenie bazuje na module ESP32-S3. Ten malutki, ale wydajny obliczeniowo mikrokontroler łączy się bezprzewodowo z innymi urządzeniami w mgnieniu oka, eliminując uciążliwe procedury parowania. Niezależnie od tego, czy znajduje się on w kieszeni, czy na breloczku, MicroMote zapewnia zdalną kontrolę nad Twoimi urządzeniami w każdym miejscu domu.
MicroMote to rewolucyjny pilot, w którym ESP32-S3 korzysta ze zintegrowanego sensora gestów Grove obrazującego w podczerwieni ruchy dłoni. To innowacyjne i kompaktowe urządzenie, mierzące zaledwie 4 cm, ma na celu zmianę sposobu, w jaki komunikujemy się z urządzeniami inteligentnego domu, takimi jak lampy, klimatyzacja itp. Mikrokontroler ESP32-S3 oferuje nie tylko wysoką wydajność obliczeniową i sprawność energetyczną, ale ma wbudowany kompletny bezprzewodowy interfejs sieciowy, dzięki czemu podłączenie systemu do Internetu jest naprawdę łatwe.
Urządzenie korzysta z protokołu ESP-NOW - jest to system do błyskawicznej i niezawodnej komunikacji z innymi urządzeniami. Użycie gotowego i szeroko aplikowanego sposobu komunikacji pozwala na prostą integrację tego modułu z innymi elementami ekosystemu, które korzystają z ESP-NOW. MicroMote został zaprojektowany do współpracy z różnymi domowymi urządzeniami Internetu Rzeczy i nie tylko. Dzięki szerokiemu zakresowi rozpoznawanych gestów układ pozwala na bardzo elastyczną konfigurację.
Dzięki niewielkim rozmiarom MicroMote jest urządzeniem przenośnym i łatwym do noszenia w kieszeni, np. jako breloczek do kluczy. Można zabrać go ze sobą, co ułatwia zachowanie ciągłej kontroli nad sterowanymi urządzeniami.
Potrzebne elementy
Do zbudowania tego prostego modułu będziemy potrzebowali zaledwie kilku komponentów elektronicznych. Całość zostanie zamknięta w wydrukowanej w 3D obudowie, która skręcona jest pojedynczym wkrętem samogwintującym M2. Ponadto potrzebne będą:
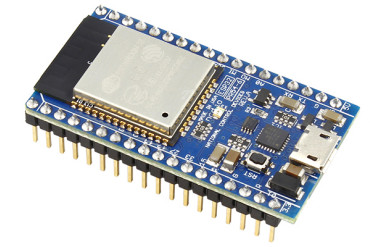
- moduł Seeed Studio XIAO ESP32-S3,
- moduł sensora gestów Seeed Studio Grove Smart IR,
- mały akumulator litowo-polimerowy 3,7 V.
Dokumentacja do wydrukowania obudowy dla modułu dostępna jest na stronie z projektem. Autor udostępnił pliki STL do druku 3D, a także cały projekt w Fusion 360.
Płaszczyzna działania sensora gestów
Dystans działania wybranego detektora gestów wynosi od 15 do 30 cm. Zasięg nie przekracza 35 cm. Sensor wyposażony jest w kamerę o polu widzenia o szerokości 78,3° (poziomej) i 62,9° (pionowej), więc obszar jego działania wynosi 48×36 cm przy odległości dłoni od sensora równej 30 cm.
Oprócz odległości od czujnika, warto zwrócić uwagę na jego umieszczenie. Z przodu czujnika, w lewym górnym rogu, znajduje się mała postać ludzika. Jeśli widzimy tę figurkę stojącą wyprostowaną, to oznacza, że czujnik jest umieszczony we właściwej orientacji. Jeśli jest odwrócona, to prawdopodobnie nie uzyskamy poprawnego wyniku rozpoznania gestu.
Ponieważ tło może wpływać na dokładność rozpoznawania gestów, zaleca się unikania względnie jasnych, odbijających elementów umieszczonych za dłonią. W normalnych warunkach rozpoznawania gestów zaleca się utrzymanie odległości co najmniej 35 cm między dłonią a tłem za nią.