
Układ współpracuje z silnikiem jednocylindrowym czterosuwowym z zapłonem iskrowym. Łatwo można go zainstalować również w innych pojazdach. Filmik pokazujący działanie układu cyfrowego prędkościomierza i LED-owego obrotomierza.
Jak to działa? - cyfrowy prędkościomierz i LED-owy obrotomierz
Działanie układu polega na zbieraniu impulsów – sygnałów obrotów silnika z cewki zapłonowej (styk po pierwotnej stronie cewki) oraz sygnałów z czujnika prędkości (czujnik zbliżeniowy przy zębatce napędu) i wyświetlaniu obrotów na linijce z niebieskich diod LED, a prędkości na dwóch czerwonych wyświetlaczach siedmiosegmentowych LED. Schemat układu pokazany jest na rysunku 1.
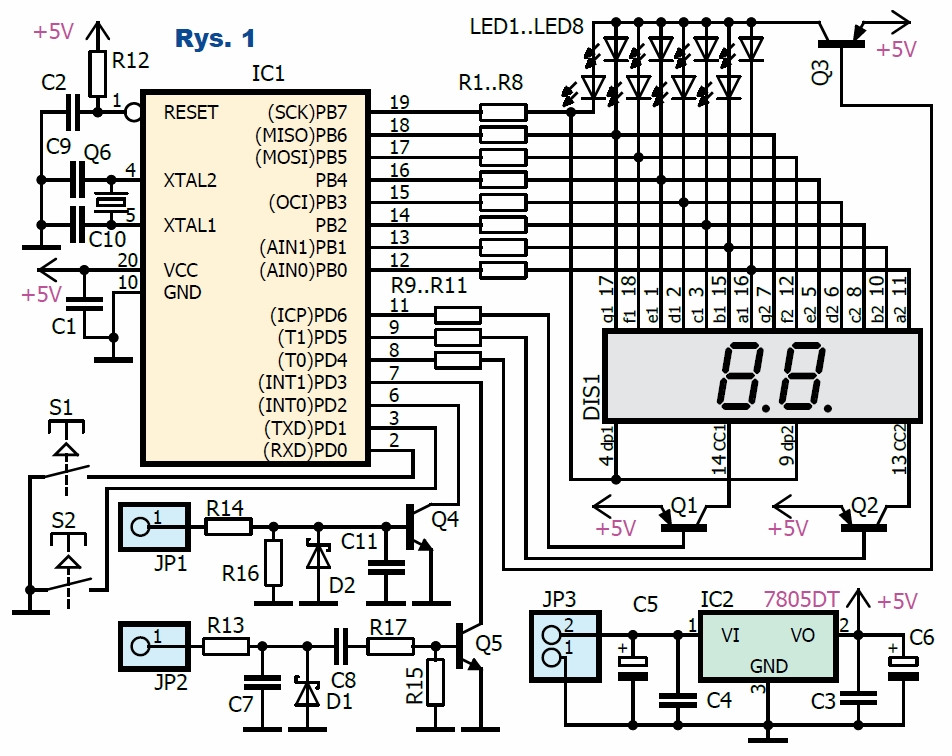
Sercem układu jest mikroprocesor ATtiny2313 w obudowie SO-20. Program napisany w BASCOM-ie zajmuje praktycznie całą pamięć 2kB. Udało się dodatkowo wcisnąć dwie funkcje: licznika kilometrów i zapisu maksymalnej prędkości. Do punktu jp1 podłączamy sygnał z czujnika zbliżeniowego. Rezystory R14 i R16 tworzą dzielnik napięcia, dopasowując jego poziom przez tranzystor Q4 do wejścia procesora.
Zliczanie impulsów jest obsługiwane w przerwaniu zewnętrznym int0. Co sekundę zliczone impulsy prędkości są wyświetlane na wyświetlaczu. Do punktu jp2 podłączamy sygnał sterujący cewką zapłonową. R13C7 tworzą filtr dolnoprzepustowy eliminujący krótkie zakłócenia. D1, C8, R17, R15, Q5 formują sygnał, doprowadzając go do wejścia zewnętrznego przerwania int1 procesora. Proporcjonalnie policzone i przetworzone impulsy zaświecają linijkę ledów dwa razy na sekunde.
LED-y D1...D8 i wyświetlacz Disp1 są sterowane multipleksowo przez procesor, anody załączane są tranzystorami Q1, Q2, Q3. Rezystory R1...R8 ustalają prąd LED-ów, a tym samym jasność świecenia. Elementy C3...C6, IC2 to zasilacz 5V.
Przycisk S1 trzymany krótko pokaże przejechany dystans. Po przytrzymaniu 10 sekund licznik zostanie wyzerowany. Maksymalnie zliczy 99km. Przycisk S2 trzymany krótko pokaże maksymalną prędkość, z jaką jechał pojazd. Reset nastąpi po przytrzymaniu przycisku 10 sekund.
W instalacji quada nie ma czujnika dającego sygnał prędkości. W handlu za kilkanaście złotych dostępne są czujniki zbliżeniowe (fotografia 1) – reagujące na bliskość metalu i indukcyjne (fotografia 2) wykrywające pole magnetyczne. Indukcyjny wymaga zamocowania na ruchomej części, np. na zębatce, kilku magnesów. W mojej instalacji zamontowałem czujnik z wyjściem, które daje stan wysoki, wykrywając metal i stan niski przy braku bliskości metalu.


Montaż i uruchomienie cyfrowego prędkościomierza i
LED-owego obrotomierza
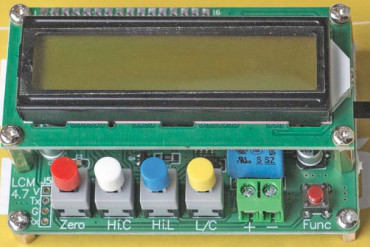
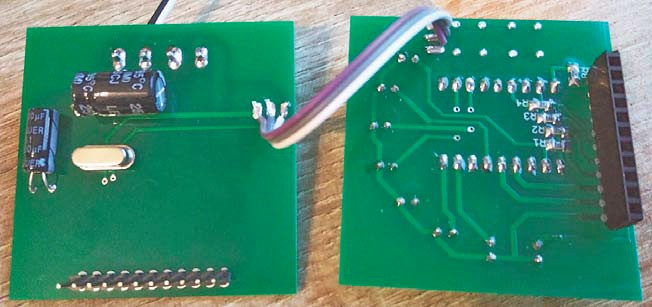
Układ można zmontować na płytce, pokazanej na rysunku 2. Model przedstawiony jest na fotografiach. Montaż nie jest trudny, zaczynamy od małych elementów SMD, kończymy na dużych. Złącze jp3 i jp4 na płytce drukowanej trzeba połączyć przewodem.
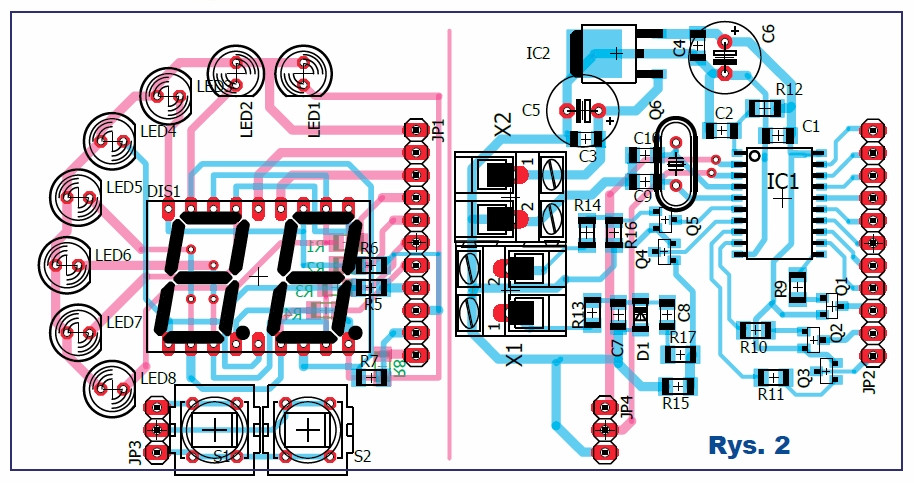
Płytki łączymy gniazdem i wtykiem goldpin jp1, jp2. Są zaprojektowane jako kwadratowe, ale na rogach nie ma umieszczonych elementów, co nie utrudni montażu w okrągłych obudowach.
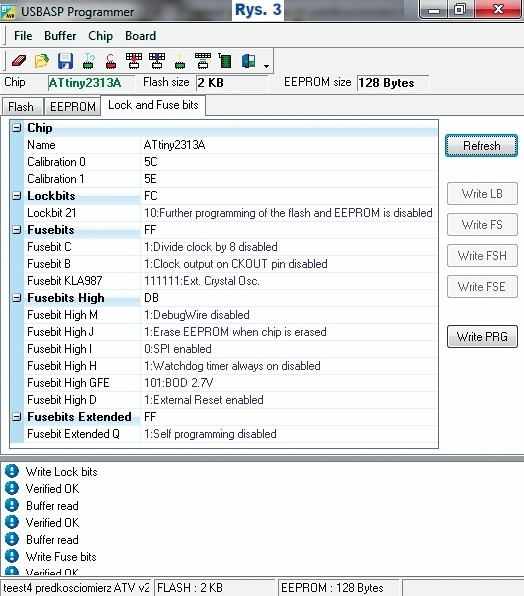
Poprawny montaż i zaprogramowany procesor sprawi (fusebity na rysunku 3), że układ zacznie działać od razu. Po podaniu zasilania pojawi się test – zaświecą się i zgasną po kolei wszystkie cyfry i LED-y obrotomierza. Mając układ zmontowany na stole, można podawać 12V na wejścia impulsów jp1, jp2 w szybkim tempie, wtedy wyświetlacze pokażą losowe wartości.

Po testach okazało się, że trzeba dodać elementy D2, C11 w obwodzie czujnika prędkości. Kiedy jego wyjście jest nieaktywne, wtedy wisi w powietrzu i wejście jp1 zbiera z instalacji zakłócenia, co uruchamia przerwanie liczące impulsy.
Liczba zebranych impulsów z cewki zapłonowej co 0,5 sekundy podzielona zostaje przez 10, a to zaświeca na wolnych obrotach jedną diodę LED, a przy maksymalnej prędkości obrotowej wszystkie LED-y D1...D8. Upraszcza to obliczenia i długość kodu.
Aby dopasować urządzenie do silnika innego niż jednocylindrowy czterosuwowy, trzeba zmienić linijkę:
ledobr = sumaobr / 11 ‚przelicza ilosc imp, z cewki na obroty, co daje mniejszą objętość kodu !!!
Doświadczalnie zmieniamy tutaj dzielnik, aby zaświecić także LED-y D1...D8.
Czujnik zbliżeniowy w moim pojeździe zamontowany jest blisko tylnej zębatki. Zębatka ma 4 ramiona, czujnik na jeden obrót koła daje 4 impulsy. Obwód 10-calowego koła to 1,3m. Procesor dostaje sygnał co 0,35m.

Po zliczeniu 286 impulsów procesor zapisuje w pamięci eeprom przejechane 100 metrów:
if drogatmp > 286 then ‚stała drogi =35cm * 268 daje 100metrów !!!
W poniższej linijce kolejne nadchodzące impulsy są przeliczane na prędkość w km/h:
led = led * 126 ‚stała drogi to 35cm/impuls razy 3,6 m/s -> co w km/h daje ==> 126
Aby licznik dawał prawidłowe wskazania, należy dopasować mnożnik do własnej konstrukcji: do rozmiaru koła (należy zmierzyć obwód) i do liczby impulsów na obrót.
W moim przypadku przy czterech impulsach rozdzielczość pomiaru prędkości wynosi 1,26km/h. Podczas przyspieszania procesor przeliczy tak: 1, 3, 4, 5, 6, 8 itd.
Niektóre liczby „wypadają” przez niedużą rozdzielczość pomiaru, wynoszącą tylko 4 impulsy na obrót. Jeśli ktoś zechce lub będzie miał możliwość zebrania większej liczby impulsów w celu dokładniejszego pomiaru, wystarczy zmienić mnożnik w podanym kodzie. Na przykład gdy jest 8 impulsów, kod będzie wyglądał tak:
led = led * 63 ‚stała drogi 17cm/impuls razy 3,6 -- m/s -> km/h ==>63
Życzę powodzenia i radości przy korzystaniu z urządzenia!