Źródłem impulsów potrzebnych do odczytu prędkości obrotowej silnika jest alternator. Na rysunku 1 pokazano schemat typowego alternatora z wyjściem dla obrotomierza oznaczone literą „W”. Występuje tam przebieg zbliżony do prostokątnego o częstotliwości zależnej od obrotów. Jeśli mamy alternator bez tego wyjścia, musimy je dorobić we własnym zakresie, co nie powinno sprawić problemów.

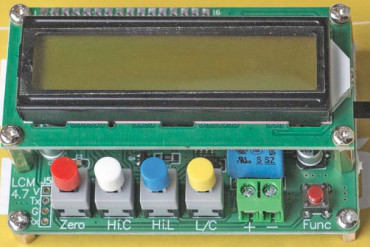
Na fotografii powyżej pokazano obrotomierz zamontowany w desce rozdzielczej. Urządzenie nie jest zbyt atrakcyjne wizualnie, ponieważ jest w nim zamontowany tylko wyświetlacz LCD. W czasie projektowania miałem zastosować skalę w postaci zaokrąglonej skali z diod LED, lecz podczas prac polowych w słoneczne dni była by ona niewidoczna. W słonecznym środowisku idealnie sprawuje się monochromatyczny wyświetlacz LCD. Obrotomierz wyświetla aktualne obroty silnika, przepracowane motogodziny oraz aktualną godzinę. Dodatkowo jest wyposażony we wskaźniki, kiedy silnik znajduje się w zakresie maksymalnego momentu obrotowego i przy jakiej prędkości obrotowej silnika wałek WOM ma 540 obr./min.
Budowa i zasada działania
Aby można było zmierzyć prędkość obrotową silnika należy mierzyć częstotliwość impulsów pochodzących z alternatora, więc tak naprawdę nasz obrotomierz jest częstościomierzem. Sygnał jest podawany na zewnętrzne wejście licznika-timera0. Licznik ma rozdzielczość 8 bitów, co pozwala na zliczeniu 256 impulsów. Impulsy nie są podane bezpośrednio na wejście procesora najpierw są uformowane na przebieg prostokątny za pomocą tranzystora T1. Elementy D3 i R10 ustalają próg, przy jakim tranzystor ma się przełączać. Rezystor R7 podciąga wejście timera do napięcia zasilania. Kondensator C12 wraz z rezystorem R7 stanowią filtr dolnoprzepustowy, który zapobiega przedostawanie się impulsów szpilkowych.
„Sercem” projektu jest mikrokontroler ATtiny461. Został wybrany ze względu na dość pojemną pamięć programu jak i 14bitowy preskaler sygnału zegarowego oraz dwa niezależnie timery. Procesor jest taktowany zewnętrznym rezonatorem kwarcowym. Do procesora dołączony został za pośrednictwem magistrali I²C zegar czasu rzeczywistego U2. Aby aktualny czas nie uległ skasowaniu zegar PCF8583 potrzebuje ciągłego zasilania. Odpowiadają za to rezystor R2, dioda D2, kondensatory C5 i C6. Dioda i rezystor odpowiadają za stabilizację napięcia a kondensatory za jego filtrowanie. Zbudowany w ten sposób zasilacz pobiera z akumulatora tylko ok. 250 mA prądu. Stałe zasilanie jest doprowadzone na złącze CON2. Zasilanie po stacyjce jest doprowadzone na złącze CON3 gdzie jest filtrowane przez C11 i trafia na stabilizator U3 potem po odfiltrowaniu przez kondensatory C7 i C10 trafia na złącze modułu wyświetlacza. Kondensator C3 o dużej pojemności stanowi zasilanie rezerwowe po wyłączeniu zasilania. Zgromadzona w kondensatorze energia wystarczy na zapisanie danych w pamięci nieulotnej procesora. Dioda D1 jest „zaworem” jednokierunkowym powoduje, że tylko sam procesor jest zasilany z kondensatora C3. Tranzystor T2 stanowi klucz elektroniczny, który jest zamknięty podczas włączonego zasilania obrotomierza. Zwiera on pin 20 procesora do masy. Pojawienie się stanu wysokiego na tym pinie, co jest równoznaczne z wyłączeniem zasilania, powoduje zapis danych do pamięci nieulotnej procesora. Dzięki takiemu rozwiązaniu pamięć jest zapisywana tylko po wyłączeniu zapłonu. Do złącza CON1 są podłączone przyciski chwilowe ze stykami NO służące do ustawiania aktualnej godziny. Przycisk SW1 służy do skalibrowania wskazań obrotomierza zasada jego działania będzie opisane w dalszej części artykułu.