



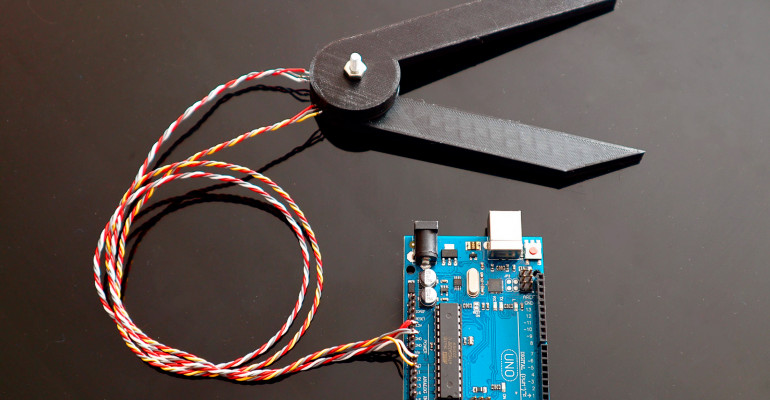

Precyzyjny pomiar kąta przydatny jest w wielu urządzeniach – ploterach, maszynach CNC, robotach i wielu innych. Konstrukcja ta jest jednocześnie na tyle prosta, że wszystkie komponenty urządzenia mogą być bez problemu osadzone w przegubach robota czy przy serwomotorze sterującym urządzeniem.
Szacunkowy koszt tego enkodera, bez modułu Arduino, to poniżej 10 dolarów (około 40 zł).
Potrzebne elementy
Do zbudowania układu potrzebne:
- 10 magnesów neodymowych o średnicy 6 mm i wysokości 3 mm,
- dwa liniowe czujniki Halla 49E/AH49E,
- śruba M4×20 mm,
- nakrętka M4,
- goldpiny,
- przewody połączeniowe,
- elementy wydrukowane w 3D (opisane dalej).
Hallotrony AH49E to proste elementy analogowe, dostarczane w obudowach TO-92 i SOT-23-3. Jeśli mamy problem z ich zakupem, a mamy dostęp do modułów KY-024, to można hallotrony pozyskać z tych płytek (są one znacznie częściej dostępne w sklepach dla hobbystów niż sensory Halla, jako elementy dyskretne).
Układ elektroniczny
Obwód enkodera jest bardzo prosty – dwa sensory pola magnetycznego podłączone są do masy (linia czarna) i zasilania – 5 V. Sygnały wyjściowe z sensorów podłączone są do wejść analogowych A0 i A1 modułu Arduino.
W przypadku braku pola magnetycznego napięcia wyjściowe na pinach A0 i A1 z każdego sensora wynoszą Vcc/2 = 2,5 V, w przypadku zasilania układu z linii 5 V (maksymalne napięcie zasilania sensora to 8 V). Odpowiada to odczytowi przetwornika analogowo-cyfrowego (ADC) w Arduino równemu 512 (1023/2 – przetwornik w module Arduino jest 10-bitowy).
Zasada działania
10 magnesów ułożonych w okrąg w jednym z wydrukowanych elementów. Bieguny magnesów skierowane są w osi góra–dół. Ułożone są naprzemiennie. Nad magnesami umieszczono wizualizator pola magnetycznego w postaci cienkiej płytki ze specjalnym materiałem.
Żółty kolor pokazuje obszary z najsłabszym polem, gdzie zmiana wartości na hallotronie będzie najsłabsza. Kolor niebieski reprezentuje z kolei maksimum pola, czyli miejsca, gdzie czujnik Halla wskazywać będzie najwyższą amplitudę. Powodem, dla którego żółte obszary są okrągłe, jest to, że linie pola z każdego z północnych biegunów magnetycznych wychodzą we wszystkich kierunkach. Płytka do wizualizacji pola magnetycznego nie jest wymagana podczas konstruowania tego układu.
Zastosowany układ magnesów skutkuje podzieleniem okręgu na 10 segmentów, każdy po 36°. Gdy jeden czujnik trafi na środek segmentu, drugi jest pomiędzy nimi. Dzięki temu, w czasie obrotu, jeśli jeden z sensorów na wyjściu będzie miał przebieg sinusoidalny, to na wyjściu drugiego zaobserwujemy cosinus.



















