




Stworzenia z serii gier Legend of Zelda, która publikowana jest od 1992 roku, były inspiracją do tego projektu. We wszystkich występują te przypominające kurczaki istotny. Jak można przeczytać w jednym z opisów gry „… jeśli Link [główny bohater gry – przyp.red.] zaatakuje Cucco wiele razy, Cucco wpadnie w furię i zacznie bardzo głośno piać, aby przywołać swoje stado i razem zaatakują go, lecąc w dół z różnych kierunków (dziobiąc go na śmierć). Po zaatakowaniu przez stado Cucco Link nie ma sposobu, aby się obronić, chyba, że uda mu się uciec na czas, uciekając z danej okolicy”.
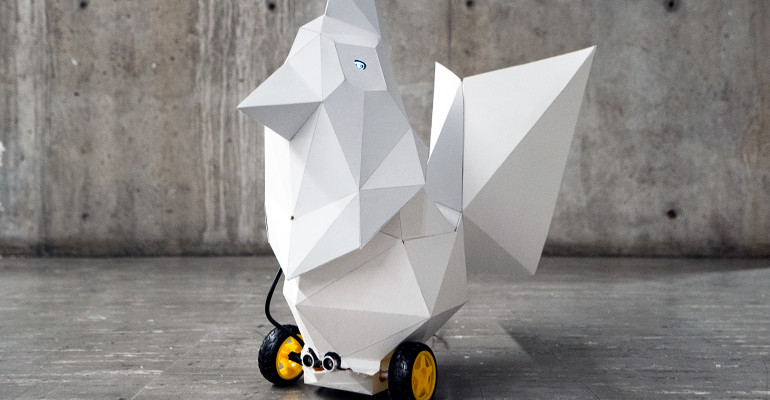
Budowany w ramach tego projektu robot ma na celu udawanie tego stworzenia, włącznie z emulacją jego zachowań. Po wystawieniu go na działanie wystarczająco głośnego hałasu Cucco przechodzi w tryb ataku i zaczyna gonić najbliższy przedmiot, wysyłający sygnał cieplny kontrastujący z temperaturą otoczenia. Projekt został realizowany w ramach Computational Design and Digital Fabrication Seminar w programie International Master of Science (ITECH) na uniwersytecie w Stuttgarcie przez Matthiasa Hornunga, Otto Lindstama i Kalaivanana Amudhana.
Potrzebne elementy
Do zbudowania robota Kukko potrzebne będą:
- dwa moduły Arduino UNO,
- moduł Adafruit AMG8833,
- mikrofon elektretowy (w module KY037 lub podobnym),
- sensor ultradźwiękowy HC-SR04,
- moduł audio MY-H1658,
- sterownik silników Adafruit AMG8833,
- dwa silniki DC z przekładniami i kołami,
- dwa wyświetlacze OLED z kontrolerem SSD1306,
- przewody do płytki stykowej/goldpinów,
- płytka stykowa,
- dwie baterie 9 V z klipsami.
Dodatkowo, do wykonania obudowy potrzebny będzie wydruk 3D, klej, taśma dwustronnie klejąca itp. Wymienione elementy oraz narzędzia zostały pokazane na rysunku 1.

Część elementów z listy dostępnych jest, jako zestawy, np. w Internecie zakupić można zestaw składający się z dwóch sterowników silnika i czterech silników, zintegrowanych z przekładniami. Jeden taki zestaw zawiera elementy do skonstruowania dwóch takich robotów, jednak dobrze jest mieć jakieś części zamienne, konstruując taki pojazd. Na rysunku 2 pokazano rozmieszczenie niektórych komponentów w całej konstrukcji. Na liście potrzebnych elementów zapisano dwie płytki Arduino UNO, ponieważ druga płytka może być potrzebna do rozwiązania pewnych konfliktów w jednej z zastosowanych bibliotek.


















