




Roboty balansujące to kategoria maszyn, które wyróżniają się utrzymywaniem pewnego systemu mechanicznego w tzw. równowadze chwiejnej. Jest to stan, w którym ruch maszyny, powoduje powstanie takich składowych siły, które dalej wypychają ją ze stanu równowagi. Przykładem może być tutaj np. balansowanie piłki na palcu – chwila zawahania i piłka spada na ziemię. Balansowanie jest tutaj aktywne – cały czas musimy dokonywać drobnych korekt pozycji, aby piłka pozostawała na czubku palca. System taki pracuje w zamkniętej pętli sprzężenia zwrotnego – obserwując układ widzimy, jakie musimy dokonać korekty, aby pozostał on w równowadze.
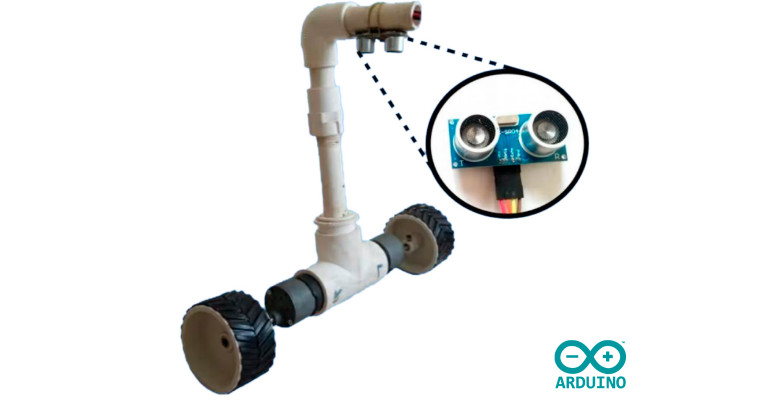
W artykule prezentujemy konstrukcję samobalansującego robota na kółkach, który jest sterowany przez moduł Arduino UNO i ultradźwiękowy czujnik odległości. Dzięki pracy w zamkniętej pętli sprzężenia zwrotnego, robot jest w stanie utrzymać stabilną pionową postawę.



















