
- pomiar wielkości indukcji magnetycznej,
- pomiar biegunowości magnetycznej (S lub N),
- zasilanie z akumulatora litowego lub poprzez złącze USB,
- wbudowany kontroler ładownia akumulatora litowego.
W roli czujnika pola magnetycznego zastosowano precyzyjny przetwornik Halla pod postacią układu scalonego A1308 firmy Allegro MicroSystems. Przetwarza on siłę pola magnetycznego na proporcjonalny sygnał napięciowy (wykorzystując efekt Halla) z rozdzielczością 1,3 mV/Gauss. Aby zapewnić deklarowaną przez producenta dokładność pomiaru przetwornik musi być zasilany ze stabilnego źródła napięcia o wartości 5 V, co biorąc pod uwagę przenośny charakter urządzenia narzuciło dość wysokie wymagania dotyczące bloku zasilającego.
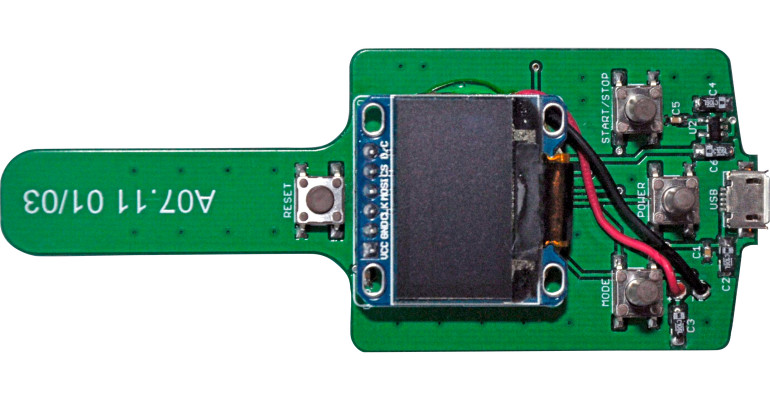
Budowa urządzenia
Zaprojektowano średnio skomplikowany system mikroprocesorowy, w którym za funkcjonowanie urządzenia odpowiada mikrokontroler ATmega88 firmy Microchip (Atmel) taktowany wewnętrznym, wysokostabilnym oscylatorem o częstotliwości 1 MHz.
Napięciem zasilania systemu mikroprocesorowego jest napięcie 2,8 V dostarczane przez liniowy stabilizator LDO pod postacią układu scalonego AP2127K-2.8TRG1 (U2). Napięcie to, poprzez prosty klucz z tranzystorami MOSFET (T2, T3) trafia na wejście przetwornicy DC/DC (tzw. pompy ładunku) zbudowanej na bazie układu scalonego MCP1252-ADJ (U6), na wyjściu której dostępne jest napięcie 5,5 V. Zastosowanie klucza tranzystorowego wynika z wymagań dotyczących energooszczędności urządzenia, a co za tym idzie potrzeby załączania/wyłączania bloku zasilającego przetwornik Halla. Co więcej, przetwornicę MCP1252-ADJ wyposażono w wyprowadzenie PGOOD, dzięki czemu system mikroprocesorowy może zaczekać na ustabilizowanie się napięcia wyjściowego.
Napięcie z przetwornicy trafia na wejście stabilizatora LDO – układu scalonego TPS76350DBVT (U5), na którego wyjściu pojawia się pożądane 5 V zasilające czujnik Halla. Ponadto, układ U5 wyposażono w wejście EN (Enable), dzięki któremu możemy włączać/wyłączać stabilizator, co ma znaczenie w aplikacjach o niskim poborze mocy.