Typowymi magistralami komunikacyjnymi pomiędzy ECU w motoryzacji są obecnie Controller Area Network (CAN), Local Interconnect Network (LIN), FlexRay i Ethernet, gdzie magistrala CAN pozostaje najpopularniejszą ze względu na łatwość implementacji, odporność na zakłócenia, możliwość przesyłania wiadomości z określonym priorytetem, arbitraż bitowy do obsługi konfliktów na magistrali, wykrywanie błędów itd.
Łatwość, z jaką można skalować sieć w pojazdach poprzez dodawanie węzłów do istniejącej magistrali CAN, jest ogromną zaletą, jednak stać może się również problemem, gdy sieci te stają się złożone, na przykład połączone w topologii gwiazdy. Odbicia powodowane przez punkty w sieci bez terminacji, które są dołączane do tych sieci, mogą powodować wadliwą komunikację, szczególnie przy wyższych prędkościach. Z tego powodu transceivery standardu CAN-Flexible Data Rate (FD), choć klasyfikowane, jako 5 Mb/s, muszą być używane z prędkością przesyłu danych poniżej 2 Mb/s w rzeczywistych warunkach. Zdolność do poprawy sygnału (tzw. SIC) umożliwia korzystanie z transceiverów CAN-FD z szybkością 5 Mb/s i wyższą w złożonych sieciach gwiaździstych bez konieczności większych zmian w projekcie.
Co to jest SIC?
SIC (Signal Improvement Capability) oznacza zdolność do poprawy sygnału. Jest to dodatkowa funkcja implementowana w transceiverach CAN-FD, która zwiększa maksymalną szybkość transmisji danych możliwą do osiągnięcia w złożonych topologiach gwiazdy poprzez minimalizację oscylacji sygnału. Transceivery CAN z SIC muszą spełniać lub przewyższać specyfikacje nakładane przez normę ISO 11898-2:2016 dla szybkiej warstwy fizycznej CAN oraz być zgodnym z specyfikacją systemu poprawy sygnału organizacji CAN-in-Automation (CiA) numer 601-4.
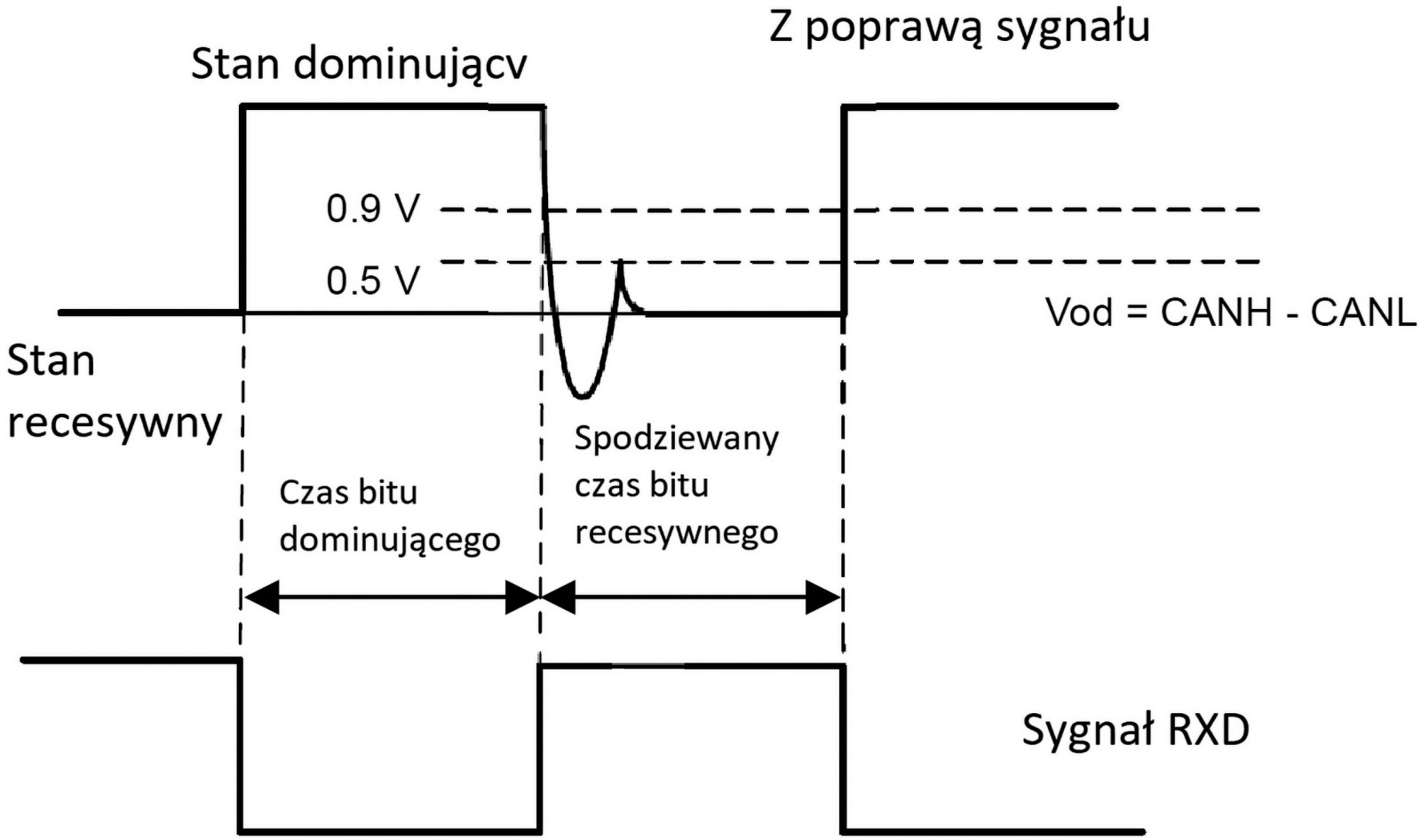
Na rysunku 1 pokazano zwykły transceiver CAN-FD, w którym sygnał magistrali CAN oscyluje powyżej poziomu 900 mV (dominujący próg odbiornika CAN) i poniżej 500 mV (próg recesywny odbiornika CAN), co powoduje odbiór błędnych danych.
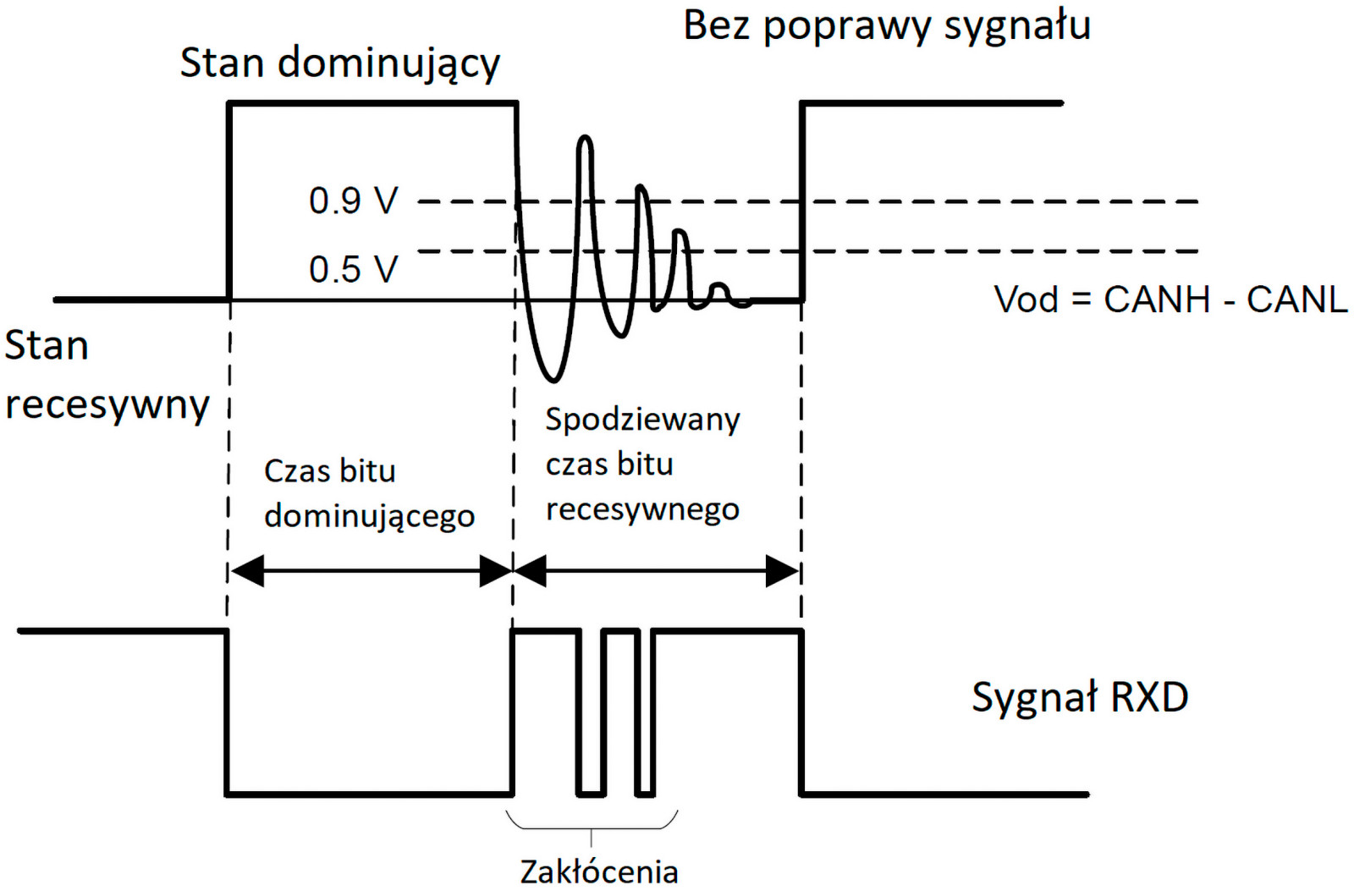
Na rysunku 2 pokazano, w jaki sposób transceiver obsługujący CAN SIC zgodne z CiA 601-4 tłumi oscylacje sygnału magistrali, dając w rezultacie prawidłowy sygnał RXD.
Jeśli chodzi o parametry elektryczne, transceiver CAN SIC zgodny z CiA 601-4 ma znacznie ściślejszą symetrię taktowania bitów i lepszą specyfikację opóźnienia pętli w porównaniu do zwykłego transceivera CAN-FD, jak pokazano w tabeli 1.
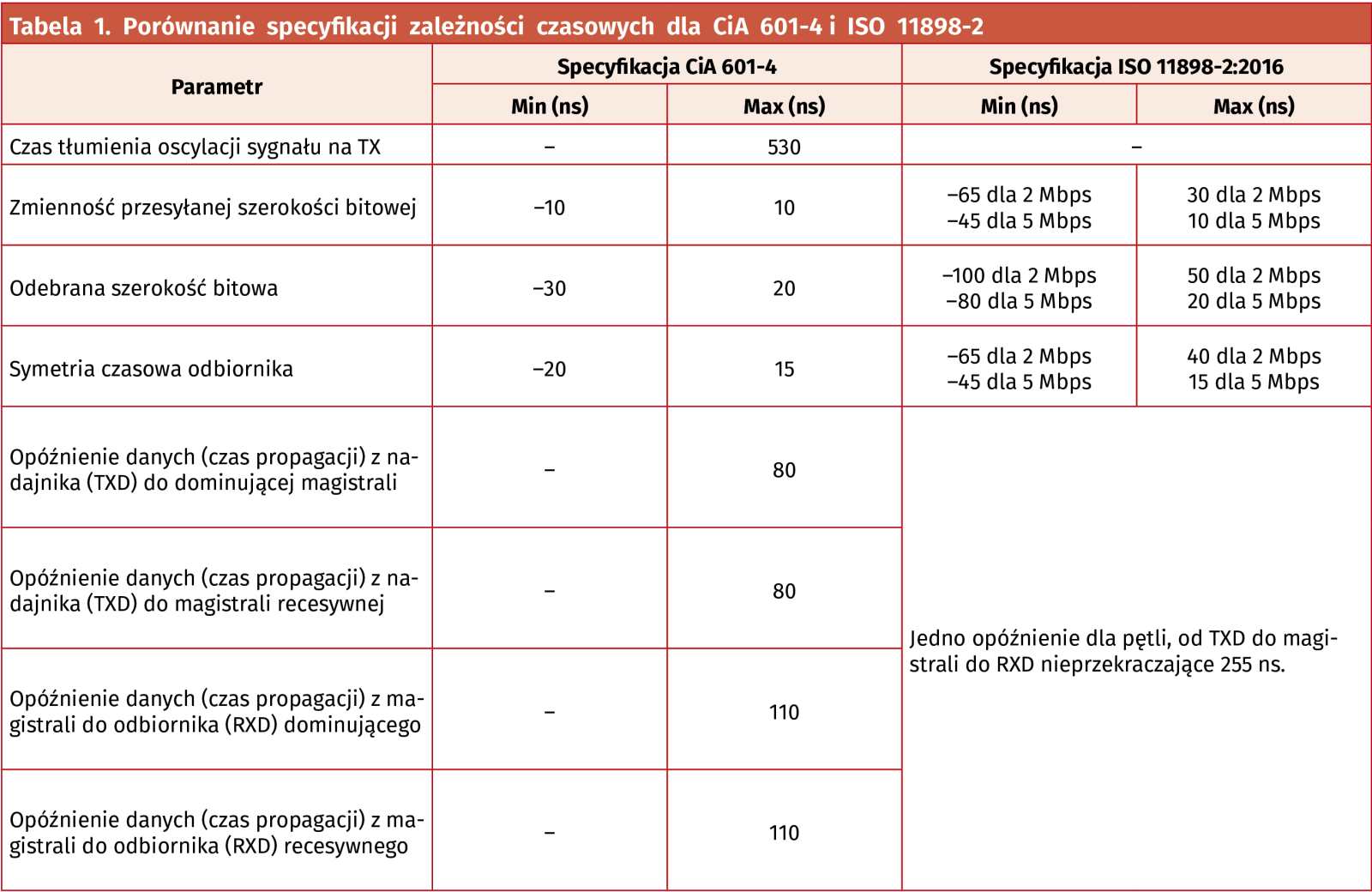
Dobranie opóźnień ścieżek nadawczych i odbiorczych może pomóc projektantom systemów w jasnym obliczeniu opóźnienia propagacji sieci w obecności innych elementów łańcucha sygnałowego. Należy zauważyć, że taktowanie określone w CiA 601-4 jest niezależne od szybkości transmisji danych i odnosi się zarówno do operacji z szybkością 2, jak i 5 Mb/s.