Jesteśmy członkami Koła Naukowego Elektroniki i Informatyki w Knurowie (knei.pl), które od 2015 roku zrzesza uczniów szkół podstawowych, średnich oraz studentów, pomagając im rozwijać się w zakresie elektroniki, informatyki i nauk spokrewnionych. Sklep Kamami.pl wypożyczył nam skaner LIDAR, który zamierzamy zastosować w systemach naszego autonomicznego łazika marsjańskiego Knurów Rover. Naszym pierwszym projektem zapoznawczym było opracowanie oprogramowania wizualizującego w czasie rzeczywistym dane odbierane z LIDAR-u.

Przygotowaliśmy dwie wersje na różne platformy:
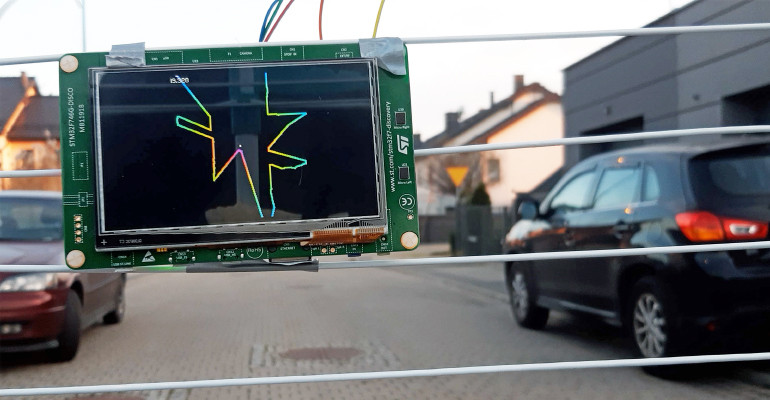
- na płytkę STM32F746-Discovery (fotografia 1) z wbudowanym wyświetlaczem,
- na komputery z systemami Windows, Linux i macOS.
Kod źródłowy obu aplikacji udostępniony jest na platformie GitHub.
LIDAR
Skaner, który otrzymaliśmy, to RPLIDAR A3M1 firmy Slamtec (fotografia 2), umożliwiający skanowanie płaszczyzny 2D w zakresie 360°. Ma możliwość regulacji prędkości obrotu głowicy oraz wykonuje do 16000 pojedynczych pomiarów na sekundę. W zależności od zastosowań, dopasowany jest zarówno do pracy wewnątrz, jak i na zewnątrz pomieszczeń. Maksymalny promień skanowania wynosi 25 metrów, ale jest zależny od warunków oświetleniowych i kolorów skanowanego otoczenia.

Komunikacja z LIDAR-em przebiega z użyciem interfejsu UART, a producent udostępnia otwartoźródłowe SDK (Software Development Kit), które zwalnia nas z obowiązku tworzenia własnych funkcji dotyczących wymiany oraz synchronizacji danych. Pakiet SDK jest dostępny na systemy Windows, Linux i macOS.