Zastosowane w robocie fotorezystory pełnią rolę jego "wzroku", podczas kiedy timery 555 są jego "umysłem". Wystarczy skorzystać z dostępnego na rysunku 1 schematu elektrycznego w celu budowy robota. Jak można zauważyć na rysunku 1, układy IC1 i IC2 to wspomniane przed chwilą timery 555, a rolę fotorezystorów spełniają elementy oznaczone jako LDR1 oraz LDR2. Silniki prądu stałego M1 i M2 występują obok rezystorów węglowych R1-R4, które cechują się wartością rezystancji 4,7 kΩ, tolerancją rezystancji ±5% i mocą 1/4 W oraz kondensatorów C1 i C2 o pojemności 0,01 µF każdy, które są poliestrowe. Warto również wspomnieć o zasilaniu z baterii o napięciu 9 V (CON1), które w ogólności jednak może być inne, zgodnie z wartościami wskazanymi w dokumentacji timera 555 oraz pozostałych elementach składowych robota, tj. płytce prototypowej, na której należy zmontować schemat elektryczny z rysunku 1, użytkując w tym celu przewody połączeniowe, 2 dużych kołach tylnych oraz mniejszym kole z przodu.
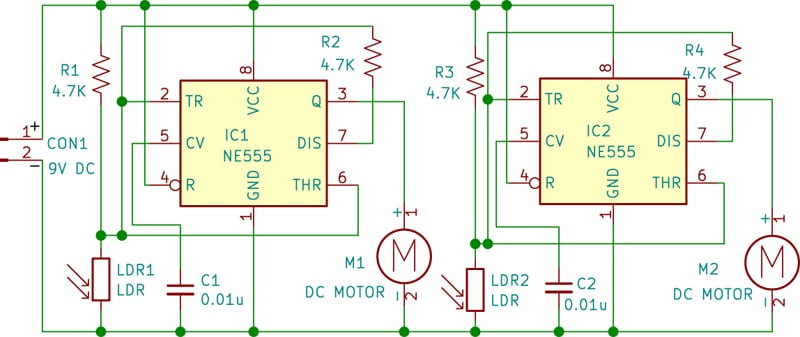
Kiedy natężenie światła padającego na fotorezystory LDR1 i LDR2 staje się wysokie, wówczas ich rezystancja maleje. A gdy staje się niskie, to wzrasta. W praktyce znajdujące się na rynku fotorezystory oferują wartości rezystancji ciemnej większe od wartości rezystancji opisującej rezystory R1 i R3. W celu pobudzenia robota należy przyłożyć dostatecznie niski potencjał na wyprowadzenia o numerach: 2 i 6 (kolejno: TR - Trigger oraz THR - Threshold). W rezultacie na wyjściach timerów 555, czyli wyprowadzeniach nr 3 (Q) pojawia się stan wysoki, a dokładniej potencjał, który aktywuje działanie silników M1 i M2. Napięcie zasilania tych silników należy dobrać pod własne potrzeby, w zależności od oczekiwanej liczby ich obrotów. Po pobudzeniu robota, należy na wyprowadzeniach nr 2 i 6 utrzymywać potencjał do wartości 6 V, czyli do ⅔ wartości napięcia zasilania timerów 555 (przypomnijmy, że chodzi tu o 9 V). Przekraczając tę wartość wzwyż, dochodzi do zatrzymania pracy silników M1 i M2, a przez to dezaktywuje się i oczekuje na powtórną aktywację robot. Jest to nic innego jak przyrost wartości rezystancji na fotorezystorach LDR1 i LDR2 - sytuacja odwrotna niż spadek wartości potencjału obecnego w miejscu wyprowadzeń nr 2 i 6. Wszystko to można z łatwością zauważyć, kiedy spojrzy się na dzielniki napięciowe, stanowione przez 2 pary podzespołów: LDR1 i R1 oraz LDR2 i R3. W celu ponownej aktywacji robota, należy, tak jak poprzednio, przyłożyć dostatecznie niski potencjał na wyprowadzenia nr 2 i 6, czyli powtórny raz doprowadzić do spadku wartości rezystancji na fotorezystorach LDR1 i LDR2. Przez sformułowanie "dostatecznie niski" należy rozumieć taką wartość, która nie przekracza wzwyż ⅓ wartości napięcia zasilania timerów 555 (dla 9 V to 3 V). Pamiętajmy też o wyprowadzeniach nr 7 (DIS - Discharge) i dołączonych do nich wewnątrz timerów 555 tranzystorach rozładowujących, które tylko powiększają spadek przedstawianej dotąd wartości potencjału.
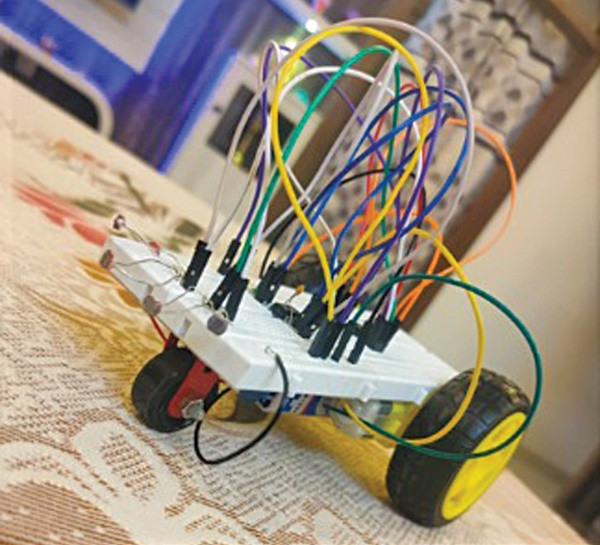
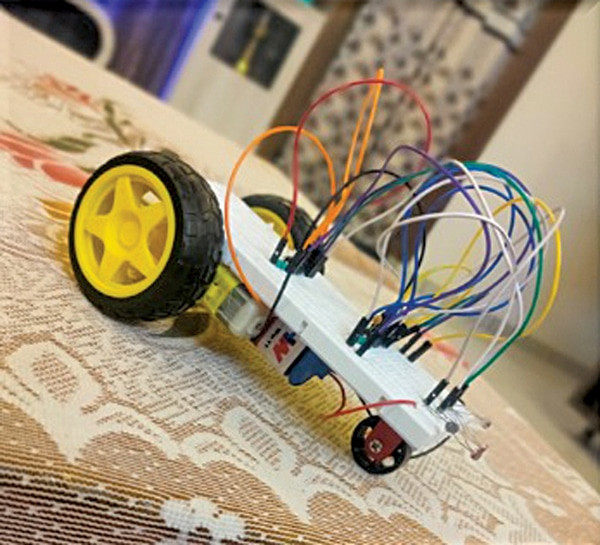
Na rysunku 2 i 3 przedstawiono przykładową realizację trójkołowego robota podążającego za światłem. Należy pamiętać o tym, żeby fotorezystory LDR1 i LDR2 rozmieścić w taki sposób w obrębie płytki prototypowej, żeby nie były zasłaniane. W przypadku kółek wypada rozważyć z uwagą ich rodzaje, aby budowany robot bez problemu poruszał się po wybranych podłożach - zgodnie z potrzebami użytkownika. Nie pozostaje nic innego, jak tylko przystąpić do realizacji projektu i zbudowania prostego rozwiązania, które podąża za światłem. I kto tu powiedział, że jest potrzebne programowanie (mikrokontrolery, mikroprocesory, Arduino itp.)?