
- 4 niezależnie sterowane przekaźniki ze stykami przełączanymi.
- 4 wejścia sygnałów cyfrowych o napięciu 0…3,3 V.
- Możliwość wysyłania powiadomień e-mailem o wystąpienia zdarzenia – alarmu lub zmiany dynamicznego adresu IP.
- Sterowanie ustawieniem wyjść i odczytem wejść z poziomu przeglądarki internetowej.
- Praca z predefiniowanymi lub przygotowanymi przez użytkownika stronami HTML.
- Możliwość ustawienia takich parametrów, jak: praca z adresem statycznym lub przydzielanym dynamicznie, zmiana adresu statycznego, zmiana adresu MAC.
- Zasilanie z portu USB lub z zasilacza zewnętrznego +5 V/200 mA – przekaźniki wyłączone, 400 mA – przekaźniki załączone.
- Ustawianie parametrów serwisowych programem narzędziowym SerwUs.
Sterownik powstał jako rozwinięcie wcześniejszej konstrukcji – zestawu AVT5450. Tamto urządzenie doskonale sprawdzało się w nieskomplikowanych zastosowaniach wymagających jedynie zdalnego włączenia lub wyłączenia jakiegoś urządzenia. Ze względu na prostotę obsługi, miał jednak ograniczone możliwości konfiguracyjne, co utrudnia jego użycie w bardziej wyrafinowany sposób. Strony HTML wyświetlane na przeglądarce mają uproszczony wygląd bez możliwości zmian np. dołączenia elementów graficznych. Ostatecznie powstało całkiem nowe urządzenie, które nazwałem ARS3-ER.
Budowa
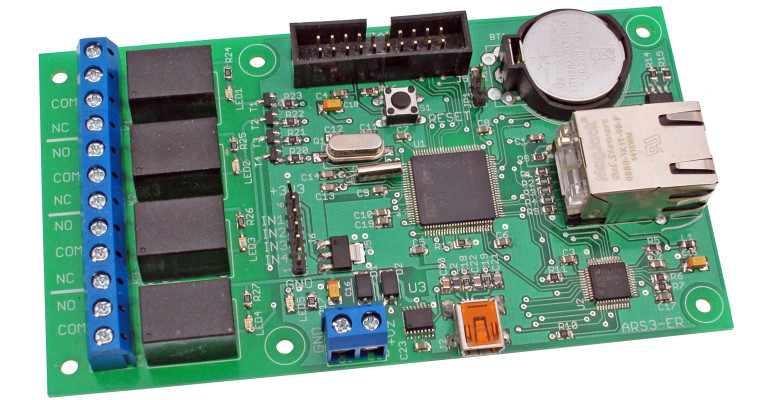
Sercem jest mikrokontroler STM32F107VCT w obudowie ze 100 wyprowadzeniami. Wyposażono go w wewnętrzną pamięć programu Flash mieszczącą 256 kB oraz pamięć RAM o pojemności 64 kB. Mikrokontroler ma wbudowany interfejs MAC (Media Access Controller) umożliwiający dołączenie do sieci Ethernet. Do dołączenia do sieci potrzebne są jeszcze dwa elementy: układ pełniący funkcje interfejsu PHY (Physical Interface Device) i transformator z gniazdem do fizycznego przyłączenia sterownika do sieci. W opisywanym urządzeniu w roli interfejsu PHY zastosowano układ DP83848VV. Zastosowano również gniazdo RJ45 z wbudowanym transformatorem separującym.
Na schemacie mikrokontroler U1 pokazano jako osobne bloki portów i segmenty pozostałych wyprowadzeń funkcjonalnych. Układ U2 jest interfejsem PHY. Łączy się z kontrolerem liniami portów programowo skonfigurowanymi do współpracy tych dwu elementów. Z kolei do U2 jest dołączony sprzęg magnetyczny J1, do którego bezpośrednio przyłącza się wtyczkę kabla sieciowego. Warto wspomnieć, że U2 (interfejs PHY) ma kilka wyprowadzeń wstępnie ustawiających tryb jego pracy. Stan tych wyprowadzeń badany jest podczas restartu układu U2.
Jeśli:
- wyprowadzenie 26 (AN_EN /LED_ACT/COL) jest wewnętrznie podciągane do poziomu wysokiego,
- wyprowadzenia 27 i 28 (AN_1 /LED_SPEED), (AN_0 /LED_LINK) są poprzez diody LED podciągane do poziomu wysokiego,
- to przy ustawieniu interfejs PHY będzie pracował w trybie negocjacji. Oznacza to, że będzie możliwa praca w trybach half i full duplex, zarówno z wolniejszymi urządzeniami 10BASE-T jak i szybszymi 100BASE-TX.
Jeśli:
- wyprowadzenie 39 (MII_MODE /RX_DV) zostanie podciągnięte do poziomu wysokiego opornikiem R11,
- wyprowadzenie 6 (SNI_MODE /TXD_3) jest wewnętrznie wyzerowane (zwarte z masą),
- to przy takim ustawieniu wyprowadzeń układ U2 (interfejsu PHY) łączy się z U1 (mikrokontrolerem) w trybie RMII (tryb zredukowanej linii połączeń). Dane transmitowane są dwiema liniami TXD i dwiema RXD. W tym trybie zegar taktujący U2 ma częstotliwość 50 MHz i jest podawany z portu PA1 mikrokontrolera.
Gniazdo Mini-USB J2 i interfejs USB U3 pełnią podwójną rolę. Umożliwiają komunikację programu serwisowego SerwUs ze sterownikiem i zmianę jego ustawień. Za pośrednictwem J2 można także zasilić sterownik z portu USB. Alternatywnym sposobem zasilania urządzenia jest podanie napięcia +5 V na gniazdo J4. Zasilanie może być podłączone jednocześnie do obydwu gniazd, ponieważ gniazda zabezpieczone są diodami.
Wyjściowymi układami wykonawczymi są 4 przekaźniki K1-4, sterowane poprzez tranzystory liniami kontrolera PE2-5. Styki przekaźników wyprowadzone są na gniazda zaciskowe do przykręcania zewnętrznych przewodów.
Na grzebień złącza J6 wyprowadzone zostały bezpośrednio 4 linie portów kontrolera PA4-7. Do linii można doprowadzić sygnały o poziomach logicznych 0…3,3 V, których stan jest czytany i wyświetlany na przeglądarce internetowej. Należy unikać podawania na nie napięcia przekraczającego podany zakres, co może grozić uszkodzeniem kontrolera, ponieważ wejścia nie są zabezpieczone.
W pamięci EEPROM (U4) przechowywane są parametry konfiguracyjne urządzenia również po odłączeniu zasilania. Kwarc Q2 i bateria BT1 są jedynymi elementami zewnętrznymi bloku zegara czasu rzeczywistego wbudowanego w mikrokontroler. Dzięki baterii zegar pracuje również po wyłączeniu zasilania. Ponieważ informacje o czasie pobierane z zegara wykorzystywane są przez system powiadomień, bateryjne podtrzymanie RTC jest niezbędne dla prawidłowego funkcjonowania urządzenia.
Zapis programu do pamięci Flash mikrokontrolera można wykonać za pomocą interfejsu JTAG wyprowadzonego na gniazdo J5 bądź poprzez port USB. O wyborze decyduje ustawienie zwory JP1 podczas restartu, który można wymusić naciskając przycisk S1.