




Inteligentny łazik to znakomity projekt dla entuzjastów robotyki. Będzie również przydatny dla nauczycieli poszukujących przystępnej i jednocześnie atrakcyjnej platformy do prezentacji elementów robotyki, automatyzacji i sztucznej inteligencji.
Łazik, oparty na module mikrokontrolera Arduino Uno, wyposażony jest w przyjazny dla użytkownika interfejs komunikacyjny, umożliwiający zdalne sterowanie przez Bluetooth ze smartfona lub innych kompatybilnych urządzeń. Elastyczność jest dodatkowo zwiększona przez możliwość sterowania głosowego.
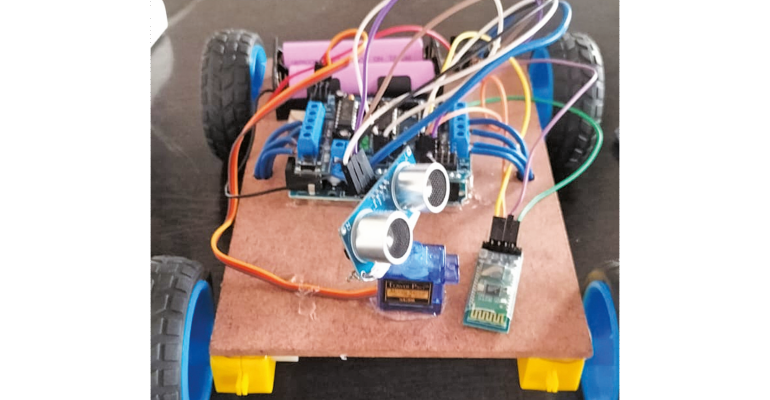
Fotografia przedstawia prototyp autora, a użyte elementy są wymienione w liście elementów.
Robot został zbudowany w oparciu o Arduino Uno (MOD1), sterownik silnika L329D (MOD2), czujnik ultradźwiękowy HC-SR04 (S1), moduł Bluetooth HC-05, cztery motoreduktory prądu stałego (M1...M4) i serwomotor oraz elementy dodatkowe jak podwozie robota i przewody połączeniowe. Sterownik silnika (MOD2) nie wymaga do połączenia z Arduino Uno żadnych przewodów – jest na płytkę Arduino po prostu wtykany.





















