




- Napięcie zasilania: 8..37V
- Liczba serwomechanizmów: 4
- Rozdzielczość regulacji: co najmniej 6 bitów.
- Zakres czasu impulsu sterującego 0,5...2ms
- Napięcie zasilania serwomechanizmów: 5V lub więcej
- Maksymalny prąd serwomechanizmów: 2,9A lub wiecej
- Liczba adresów: 512
- Zapamiętanie ostatniej pozycji serwomechanizmu po zaniku transmisji; powrót do pozycji zerowej lub neutralnej,
- Akceptacja pojedynczej transmisji lub podwójnej z eliminacją błędów
Zacznę od wstępu do artykułu, jaki ukazał się ponad 20 lat temu (w EdW 4/1997). Nieżyjący już Autor, Zbigniew Raabe, wprowadzając w tematykę sterowania serwomechanizmów modelarskich, napisał:
o położeniu, dokładniej o kącie obrotu tak zwanego orczyka. Cały ten artykuł wprowadzający w tematykę serwomechanizmów można znaleźć w Internecie pod adresami:
https://elportal.pl/pdf/k13/16_11.pdf
https://serwis.avt.pl/manuals/AVT2217.pdf
Współczesne serwomechanizmy modelarskie mogą zmieniać położenie różnych elementów, na przykład lampy LED, której barwa i moc światła jest sterowana sygnałem DMX. Wtedy jasność lamp jest sterowana przez linię DMX, a do sterowania klasycznym serwomechanizmem potrzebny jest specyficzny sygnał impulsowy i co najgorsze, najtrudniejsze – oddzielny kanał transmisyjny.
Przedstawiany projekt rozwiązuje problem oddzielnego kanału transmisyjnego: do sterowania typowym analogowym serwomechanizmem modelarskim wykorzystuje dostępny sygnał DMX. Pozwala niezależnie sterować czterema serwomechanizmami, wykorzystując cztery kanały (sloty) spośród 512 dostępnych w systemie DMX.
Opis sterownika do serwomechanizmów (system DMX)
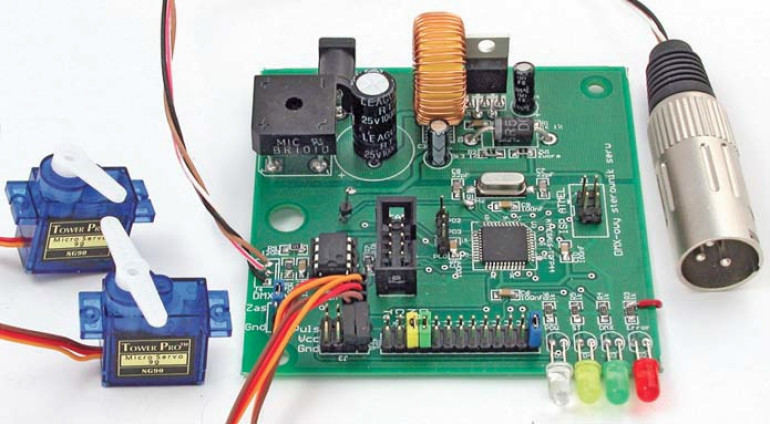
Schemat układu pokazany jest na rysunku 1. Sterownik jest zasilany z zasilacza o wydajności dostosowanej do liczby i poboru prądu zastosowanych serwomechanizmów. Napięcie zasilające jest ograniczone w stabilizatorze impulsowym U1 o maksymalnej wydajności 3A. Stabilizator zasila zarówno mikrokontroler, jak i serwomechanizmy.
Napięcie wyjściowe stabilizatora można zwiększyć do 5,5V, uzyskując większą moc serwomechanizmów. Wyższe napięcie zasilające może być groźne, ponieważ producent zaleca zasilanie mikrokontrolera maksymalnym napięciem 5,5V. Serwomechanizmy najczęściej akceptują zasilanie 4...6V, czasem więcej.
Jeśli istnieje konieczność zasilenia serwomechanizmu wyższym napięciem, można je podać na J7, w przeciwnym wypadku należy zewrzeć jumperem piny 2–3 tegoż złącza.
Sygnał DMX jest konwertowany w układzie U2. Zwierając piny 27–28 złącza JP1, można włączyć terminowanie linii. Dane transmitowane po DMX są dekodowane w U3, który generuje także przebiegi za pomocą „PWMów” sterowanych timerem 0 i 1. Zakładając zworki A0...A8 na JP1, ustalamy adres bazowy interfejsu (DMX).
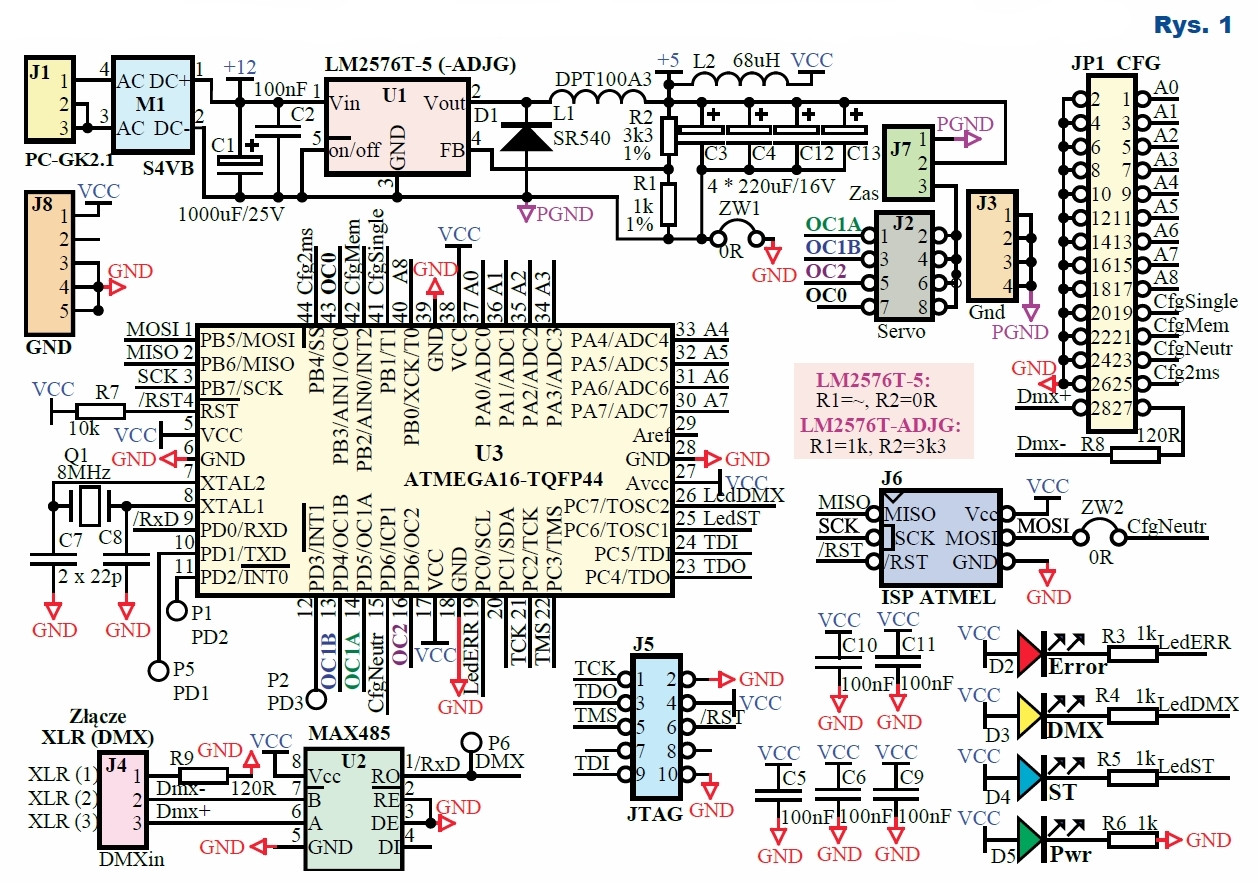
Kolejne serwomechanizmy będą miały kolejne adresy DMX: +1, +2 i +3. Zworka na pinach 19...20 włącza tryb akceptacji pojedynczej transmisji. W przeciwnym wypadku, aby dana została uznana za prawidłową, odczyty dwóch kolejnych ramek muszą dać tę samą wartość. Serwomechanizmy reagują wtedy wolniej, ale ewentualne błędy są eliminowane.
Zwierając 21 z 22 („Memory”), spowodujemy, że w przypadku zaniku komunikacji na ponad sekundę, serwomechanizmy zachowają swoje ostatnie położenie. Brak zworki spowoduje powrót serwomechanizmów do pozycji zero.
Po zwarciu pinów 24–25 „Neutral” (także piny 4–6 J6 „ISP po SPI”) serwomechanizmy wrócą do pozycji neutralnej (środkowej) – impuls 1ms dla trybu 0,5...1,5ms (1,25ms dla trybu 0,5...2ms).
Zworka na „2ms” (piny 25–26) wydłuża impuls maksymalnego położenia do 2ms. Należy pamiętać, że nie wszystkie serwomechanizmy akceptują taką wartość.
Protokół DMX był już omawiany wielokrotnie, więc go tu pominę. Danymi z wybranych slotów należy wysterować PWM-y. Okazuje się, że to nie takie proste. Impuls trwa 0,5...1,5(2ms) a odstęp pomiędzy impulsami około 20...30ms. Aby zapewnić rozdzielczość 8 bit, timer musiałby być w przybliżeniu 12-bitowy.
Niestety AVR posiadają głównie timery 8-bit, małą ilość (przeważnie jeden) 10-bit. Czasem możliwe jest uzyskanie timera 16-bit ale najczęściej jednego. Pozostaje zmniejszyć rozdzielczość do np. 4-bitów, co jest raczej nieakceptowalne.
Można też zmniejszyć częstotliwość pojawiania się impulsów z 20ms do np. 5, ale nie ma gwarancji, że wszystkie sterowniki serwomechanizmów będą akceptować takie parametry.
Zdecydowano się więc na to, aby po wygenerowaniu impulsu wyłączyć PWM na 20ms. Pierwsza próba polegająca na tym, aby w przerwaniu od przepełnienia timera wyłączać PWM-a, zaowocowało skutkiem pokazanym na rysunku 2.

Mianowicie po pierwszym przerwaniu pojawiał się krótki impuls o długości 125us. Impuls spowodowany jest tym, że PWM, w trybie FAST PWM, rozpoczyna generowanie impulsu w chwili przepełnienia timera, który później wyłączamy w obsłudze przerwań. Serwomechanizmy różnie mogą reagować na taki impuls i wyłączenie PWM należy zrealizować w przerwaniu od zrównania się licznika CNT z rejestrem OCR.
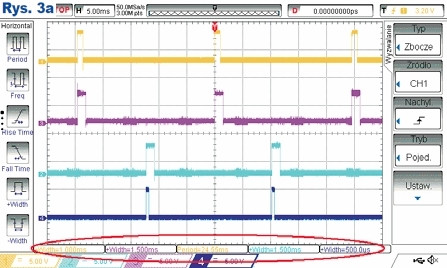
A dlaczego pierwotnie chciałem wykorzystać przerwanie od przepełnienia? Ze względu na to, że użyłem timera z dwoma PWM-ami, chciałem jednym przerwaniem włączać i wyłączać oba te PWM-y. Trzeba było niestety każdy timer włączać i wyłączać w osobnym przerwaniu od rejestru OCRxA i OCRxB. Po takiej zmianie generowany przebieg wygląda wzorcowo, jak na rysunku 3a (w innej skali czasu na rysunku 3b).

A co w sytuacji, gdy wypełnienie PWM-a będzie maksymalne?
Do takiej sytuacji nie dojdzie, bo zakres wartości PWM waha się w granicach od 64 do 128 (1,5ms) lub 192 (2ms). Daje to rozdzielczość 6 bitów, czyli 64 różne pozycje serwa, a można ją zwiększyć, taktując mikrokontroler zegarem 16MHz, używając innego podzielnika lub używając innego mikrokontrolera, w którym zakres podzielników jest większy niż w ATmega16, jak np. ATtiny25/45/85, ARM.
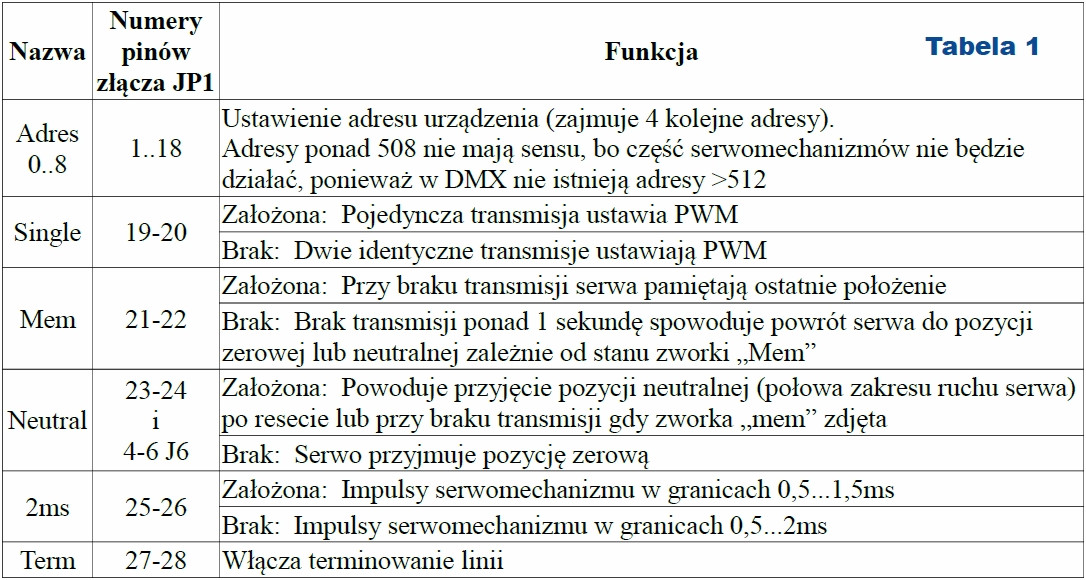
W tabeli 1 podane są funkcje zworek, a w tabeli 2 – funkcje diod LED.

Uwagi dotyczące programu (sterowanie serwomechanizmami-system DMX)
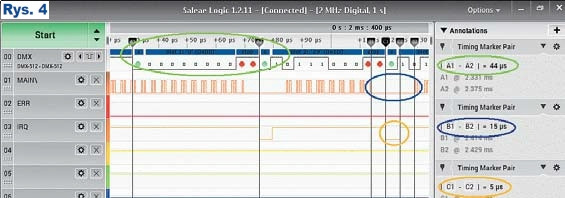
W materiałach dodatkowych w Elportalu dostępne są kody źródłowe. Przy ich modyfikacji warto wiedzieć, ile czasu mikrokontroler może poświęcić na dodatkowe działania. Na rysunku 4 pokazany jest oscylogram przedstawiający czas transmisji bajtu DMX (zielona obwódka) w stosunku do czasu obsługi przerwania funkcją SIGNAL (żółty) oraz całkowitego czasu obsługi IRQ (niebieski) łącznie z wejściem, operacjami na stosie i wyjściem z przerwania.
Czas obsługi IRQ można by zoptymalizować, pisząc wstawkę w assemblerze, a przerwanie zadeklarować z flagą NAKED. Chwila wejścia w IRQ jasno informuje o tym, że bez względu na liczbę bitów stopu przerwanie jest wywoływane po pierwszym bicie stopu. Ustawienie liczby bitów stopu ma znaczenie tylko w czasie nadawania. Na rysunku 5 jest zbliżenie pokazujące liczbę rozkazów wykonanych przez pętlę główną:
while(1) { PORTx ^= _BV(Py); }
składającej się z czterech elementarnych rozkazów:
LOOP: LD PORTx EOR y ST PORTx BNE LOOP
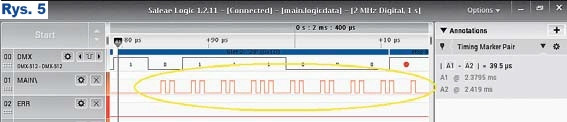
Brązowy przebieg to wynik działania tej pętli. Łatwo policzyć, że podczas transmisji bajtu mikrokontroler wykonał 72 rozkazy (18*4). Nierówne odstępy pomiędzy rozkazami spowodowane są przerwaniami od timerów. Przy zegarze 16MHz mikrokontroler wykona, co oczywiste, dwa razy więcej rozkazów. Informacja ta jest o tyle cenna, że przerwania od innych źródeł nie mogą wykonywać się zbyt długo, najbezpieczniej deklarować je jako INTERRUPT lub ISR z atrybutem NOBLOCK.
Jeśli muszą koniecznie być zadeklarowane jako SIGNAL, to należy zadbać, aby nie wykonywały się dłużej niż 88us (AVR ma dwubajtowe FIFO) łącznie z czasem operacji na stosie. Takie postępowanie jest jednak ryzykowne i wskazane aby nie przekraczać czasu transmisji jednego bajtu. Trzeba bowiem mieć na uwadze, że przerwanie wykonuje się w różnym czasie zależnie od spełnionych bądź nie różnych warunków.
Odczytanie bajtu z FIFO przy standardowej obsłudze realizowane jest przez wyjście z IRQ, wykonanie rozkazu programu głównego i wejście w IRQ. Operacja wejścia/wyjścia z IRQ trwa dwa razy dłużej niż sama obsługa IRQ. Można tę operację przyspieszyć przez sprawdzenie przed wyjściem z IRQ, czy nie ma bitu do odczytania, jeśli jest to skok na początek obsługi IRQ.
Tym sposobem przyspieszymy obsługę IRQ przez brak wychodzenia i ponownego wchodzenia w przerwanie. W tym przypadku zamiast 15us na odczyt 2 bajtów z FIFO zużyjemy tylko 20, więc aż o 33% mniej.
Przy implementacji protokołu DMX na inne mikrokontrolery należy pamiętać, że niektóre, takie jak ATmega16, 161, 162, 32, ale już nie ATmega164, wymagają wyboru, (podobnie jak UART-y rodziny 16C45x i 16C55x) najstarszym bitem rejestru UCSRC pomiędzy rejestrem statusu a rejestrem UBRRH rejestru podzielnika.
Słowo ostrzeżenia: o sterowaniu serwomechanizmami w sposób programowy (bez timerów) opisanym np. na stronie http://hobby.abxyz.bplaced.net/index.php?id=3&aid=20 można w zasadzie zapomnieć ze względu na stosunkowo szybką transmisję DMX.
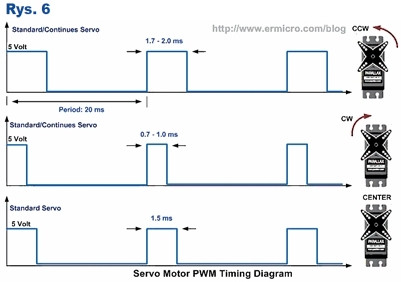
I jeszcze jedna kwestia: różne źródła podają różne zakresy czasów impulsu, od 0,5...1ms, poprzez 1...2ms do 0,2...2,3ms oraz różny czas dla położenia neutralnego: 1 albo 1,5ms. Przykład na rysunku 6. W programie zadeklarowano stałe definiujące czasy, więc w razie potrzeby łatwo je zmodyfikować.
Jeśli potrzebne jest więcej wyjść PWM, należy wykorzystać ATmega128 (6 PWM) albo po prostu połączyć ze sobą dwa sterowniki (w jednym zasilacz i driver można pominąć).
Montaż i uruchomienie sterownika do serwomechanizów (system DMX)
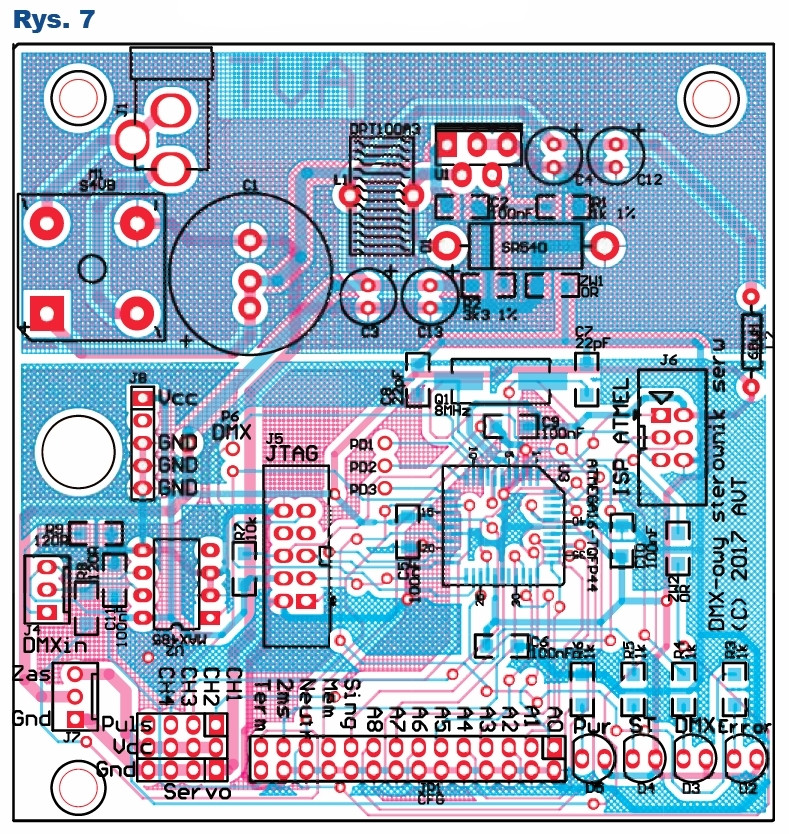
Układ można zmontować na płytce drukowanej, pokazanej na rysunku 7.
Montaż jest typowy i nie wymaga omawiania. Pod U2 warto zastosować podstawkę. U1 może wymagać radiatora przy dużym prądzie obciążenia. Na początek nie zalecam montażu mikrokontrolera i drivera U2. Uruchomienie należy bowiem rozpocząć od zasilacza. Zależnie od użytego stabilizatora (LM2567T-5 lub LM2576T-ADJG) wartości rezystorów R1 i R2 będą różne. Dopiero wtedy, gdy napięcie zasilania jest prawidłowe, można wlutować mikrokontroler i umieścić U2 w podstawce.
Jeśli układy te zostały wlutowane przed uruchomieniem zasilacza, najbezpieczniej będzie się posłużyć zasilaczem laboratoryjnym. Należy ustawić napięcie 6V, prąd ograniczyć do 100 mA. Powoli zwiększać napięcie i kontrolować je po przejściu przez stabilizator na złączu J8. Jeśli przekroczy 5,5V to został popełniony błąd. Wartość napięcia większa niż 7V może uszkodzić układy U2 i U3 (nieprawidłowe wartości R1 i R2, złe luty w ich pobliżu).
Jeśli przy napięciu na zasilaczu laboratoryjnym 8V na złączu J8 napięcie mieści się w granicach 5V ±5%, zasilacz pracuje poprawnie. Jeśli mikrokontroler nie był zaprogramowany, można to zrobić JTAG-em lub przez SPI (ISP via SPI). Należy pamiętać o odpowiednim ustawieniu bitów konfiguracyjnych jak na rysunku 8 lub użyć pliku *.ELF, w którym są zawarte dane o bitach konfiguracyjnych.
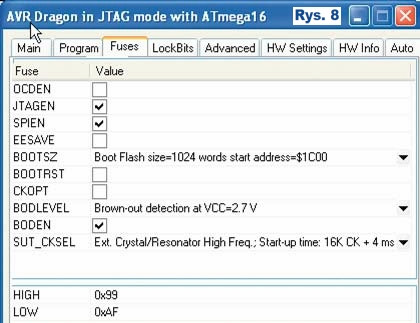
Najważniejsze jest poprawne ustawienie źródła sygnału zegarowego. Zdecydowanie nie zalecam używania wewnętrznego generatora RC 8MHz. Dwuprocentowa dokładność generator RC jest za mała aby bezbłędnie odbierać transmisję 11 bitów (start, 8 danych, dwa bity stopu). Do bezbłędnej transmisji UART wymagana jest jednoprocentowa dokładność .
BOD powinien być nastawiony na 2,7V. Przy ustawieniu 4V może się resetować podczas pracy serwomechanizmu (dioda error zaświeca się na 2 sekundy). Aby się przed tym zabezpieczyć, należałoby zasilać serwomechanizmy przez filtr LC (łatwo go wstawić do złącza J7) albo z pomocą zewnętrznego zasilacza. Zasilanie mikrokontrolera jest filtrowane dławikiem L1.
Sterownik można umieścić w obudowie KM-50, do której przystosowano otwory mocujące.



















