
- Czestotliwość PWM: 15,6 kHz.
- Rozdzielczość PWM: 10 bitów.
- Maksymalny prąd obciążający: 10 A.
- Napięcie zasilania: 9…36 V.
- Zakres napięcia na obciążeniu: 9…36 V (zależy od tranzystora wykonawczego)
- Tryby pracy (charakter prądu obciążającego): ciągły, impulsowy, trójkątny, piłokształtny.
- Wypełnienie przebiegu [%]: 5, 10, 20, 50, 70, 90.
- Okres przebiegu [s]: 0,5; 1; 2; 5; 10.
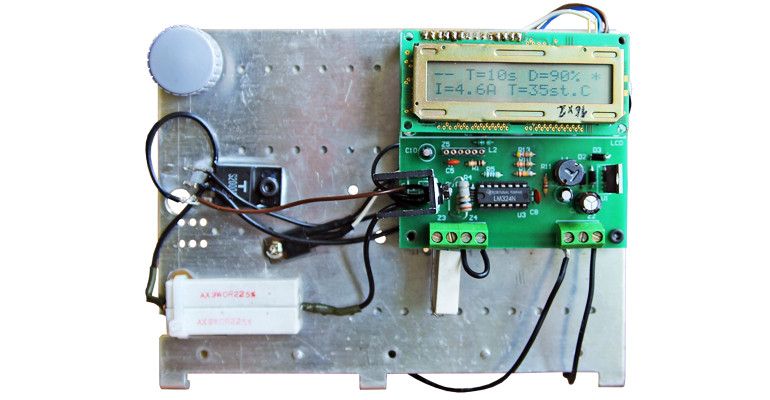
Układ stabilizatora U1 wraz z kondensatorami C1 i C2, diodą D1 i dławikiem L1 zasila całe urządzenie. Zdecydowałem się na ten układ ze względu na duży zakres napięcia wejściowego. Wyjaśnienia wymaga zastosowanie diod D2 i D3. Otóż w standardowej konfiguracji na nóżkę 4 układu LM2575T-5.0 jest bezpośrednio podawane napięcie wyjściowe, które dla tej wersji układu wynosi 5 V. Włączenie diody D2 powoduje, że teraz na wyjściu to napięcie będzie podwyższone o spadek napięcia na tej diodzie, czyli będzie wynosiło 5 V+UD2. W urządzeniu modelowym wyniosło ono 5,6 V. To napięcie służy tylko do zasilania układu U3 typu LM324, który nie ma wyjścia rail-to-rail. Oznacza to, że zakres jego napięcia wyjściowego będzie znacznie niższy niż jego napięcie zasilania. Z noty katalogowej wynika, że dla napięcia zasilającego +30 V napięcie wyjściowe wyniesie co najwyżej +28 V. Przy zasilaniu +5 V na wyjściu otrzymamy około +3,8 V. To trochę za mało i dlatego podwyższyłem napięcie zasilające U3 właśnie za pomocą diody D2. Z kolei dioda D3 kompensuje ten naddatek, aby całą resztę układu, czyli głównie procesor U2 i wyświetlacz, zasilać napięciem +5 V. Dobrą praktyką jest, aby diody D2 i D3 były umiejscowione na płytce drukowanej możliwie blisko siebie. Powinny to być diody tego samego typu, o możliwie małym rozrzucie napięcia przewodzenia.
Podstawowym zadaniem mikrokontrolera ATmega8 jest generowanie przebiegu PWM (o rozdzielczości 10-bitów) oraz pomiar napięcia na rezystorze pomiarowym Rsen.. Za pomocą PWM, pośrednio, mierząc napięcie na rezystorze pomiarowym, oprogramowanie reguluje wartość prądu obciążającego. Oprócz tego U2 steruje wyświetlaczem LCD o organizacji 16 znaków×2 linie. Jego podświetlanie pełni rolę dodatkowej sygnalizacji – alarmu o zbyt dużej temperaturze radiatora.
Zamiast typowych przycisków zdecydowałem się na zastosowanie impulsatora z aktywną ośką. Co prawda obsługa programowa jest trochę bardziej skomplikowana, ale korzystanie z takiego rozwiązania jest łatwiejsze i przyjemniejsze.
Mikrokontroler jest taktowany za pomocą zewnętrznego rezonatora o częstotliwości 16 MHz. Przejdźmy teraz do opisu części analogowej.
Przebieg PWM generowany przez mikrokontroler trafia na układ całkujący złożony z rezystora R2 i kondensatora C10. Następnie jest podawany na wtórnik napięciowy. Tak przygotowany trafia na kolejną część układu U3, w której jest porównywany ze wzmocnionym napięciem pomiarowym z rezystora Rsen. Jednocześnie, to wzmocnione napięcie pomiarowe jest podawane na wejście ADC1 mikrokontrolera U2. Pozwala to na wyświetlenie wyników pomiarów na LCD i jest sprzężeniem zwrotnym dla pętli regulacji.
W tym miejscu zwracam uwagę, że zadawanie parametrów odbywa się poprzez procesor i sygnał PWM, jednak sama regulacja jest wykonywana w sposób analogowy za pomocą wzmacniacza U3. Niestety, nie można zakładać stałości parametrów zastosowanych elementów, stąd konieczne jest regulowanie sygnału PWM w celu utrzymania stałych parametrów pracy.
Za wzmocnienie sygnału pomiarowego odpowiadają rezystory R4 i R5, dlatego w ich roli sugeruję zastosowanie takich o tolerancji 1% lub mniejszej. Stosunek rezystancji R4:R5 powinien wynosić 1,27:1. Jako tranzystor wykonawczy T2 wykorzystałem ISOBUV21 (po prostu taki był pod ręką). Niestety, jego wzmocnienie prądowe jest małe, więc konieczne stało się zastosowanie dodatkowego tranzystora pośredniczącego T1 – tutaj BD139.
Ponieważ do dyspozycji pozostała mi jedna ćwiartka układu U3, więc postanowiłem wykorzystać ją do zbudowania miernika temperatury. Duża dokładność nie jest wymagana – zdecydowałem się w roli czujnika wykorzystać złącze tranzystora PNP, który przykręciłem do radiatora. Napięcie z przekątnej mostka trafia po wzmocnieniu do wejścia ADC0 układu U2 i tam jest zamieniane na ekwiwalent temperaturowy. Rezystory R6 i R7 oraz tranzystory T4 i T5 tworzą źródło prądowe, stabilizujące prąd płynący przez tranzystor T3 wykorzystany jako czujnik temperatury. Poprawia to nieco dokładność pomiaru. Tranzystor T7 steruje pracą wentylatora chłodzącego radiator. Konieczność jego zasilania z 5 V wynika z chęci uzyskania szerokiego zakresu napięcia wejściowego zasilającego urządzenie. Takie rozwiązanie uniezależnia nas od zewnętrznego zasilacza, ale niestety dodatkowo obciąża stabilizator U1 i dlatego najlepiej wyposażyć go w mały radiator.