
- generacja sygnału sinusoidalnego o częstotliwości z zakresu 1 Hz…10 kHz,
- częstotliwość zadawana przyciskami lub enkoderem,
- możliwość zawężenia zakresu regulacji zarówno od góry, jak i od dołu,
- amplituda z zakresu 0…1,8 V regulowana potencjometrem,
- zerowa składowa stała napięcia wyjściowego,
- zapamiętywanie ustalonej częstotliwości,
- wbudowany stabilizator napięcia 5 V,
- zasilanie napięciem stałym 8 V…20 V.
Opisany układ może z powodzeniem służyć jako niedroga alternatywa dla prostych generatorów sygnału sinusoidalnego. Umożliwia dokładne ustalenie częstotliwości, więc można nim np. zdejmować charakterystyki częstotliwościowe układów działających w paśmie akustycznym.
Nie posiada wbudowanego wyświetlacza, lecz każdy współczesny oscyloskop cyfrowy, który i tak jest niezbędny podczas wykonywania pomiarów, może go z powodzeniem zastąpić.
Budowa
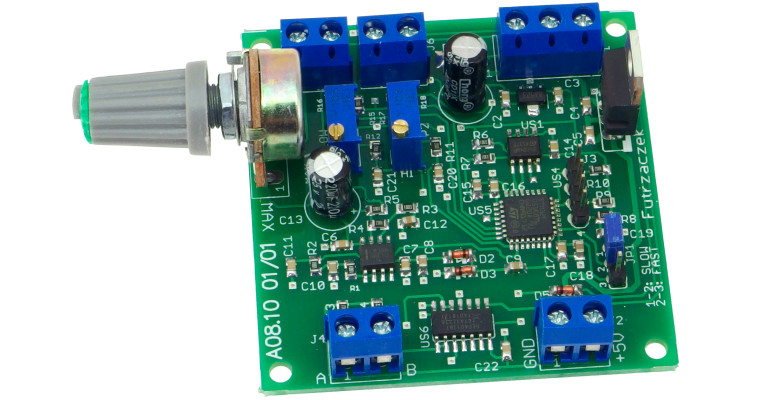
Można w nim wydzielić trzy części: cyfrową (sterującą), analogową (sygnałową) i zasilającą. W części cyfrowej, głównym podzespołem jest mikrokontroler typu STM32F051K8T6, który posiada jedno, bardzo istotne peryferium – wbudowany przetwornik cyfrowo-analogowy (DAC), który umożliwi wytworzenie sygnału analogowego o wysokiej jakości, ponieważ dysponuje 12-bitową rozdzielczością.
Mikrokontroler komunikuje się z zewnętrzną pamięcią EEPROM za pomocą interfejsu I²C. Linie danych (SDA) oraz zegara (SCL) muszą być podciągnięte do dodatniej linii zasilania przez rezystory, które umożliwiają uzyskanie wysokiego stanu logicznego. Przyciski sterujące można podłączyć do złącz J5 i J6. Ich wciskanie będzie powodowało, odpowiednio, zwiększanie oraz zmniejszanie częstotliwości wyjściowej. Rezystory R16 i R18 służą do ochrony wejść mikrokontrolera przed uszkodzeniem, które mogą wywołać wyładowania elektrostatyczne. Po pierwsze, ograniczają prąd diod zabezpieczających owe wejścia. Ponadto, po uwzględnieniu niezerowej pojemności wejściowej wyprowadzenia, zwiększają czas narastania napięcia, co pozwala diodom na wejście w stan przewodzenia.
Przy użyciu zworki JP1 można wybrać tryb pracy układu: „wolny” lub „szybki”. „Wolny” polega na jednokrotnej reakcji układu (zmianie o 1 Hz) przy każdym zwarciu zacisków złącza J5 lub J6. Z kolei, tryb „szybki” umożliwia płynną zmianę częstotliwości po dłuższym przytrzymaniu. Tryb „wolny” może zostać użyty do sterowania układu przy użyciu enkodera. Do złącza J4 należy dołączyć jego wyjście kwadraturowe. Układ złożony z dwóch przerzutników typu D ma za zadanie rozpoznać kierunek obrotu jego osi i wygenerować sygnały odpowiadające wciskaniu przycisków. Tryb „szybki” jest z kolei przydatny do sterowania układem przy użyciu przycisków monostabilnych. Dłuższe zwarcie zacisków spowoduje samoczynną zmianę częstotliwości.
Stanem aktywnym na wyjściu przerzutników D jest stan niski, toteż sprzęgnięto je z pozostałą częścią układu za pomocą diod 1N4148. Jeżeli układ sterowany jest przyciskami, potencjał katod tych diod wynosi +5 V i pozostają one stale zatkane. W momencie obracania enkoderem, katody są okresowo ściągane do potencjału 0 V, co otwiera diody i umożliwia mikrokontrolerowi rozpoznanie niskiego stanu logicznego – potencjał anody wynosi wtedy ok. 0,7 V, zaś próg napięcia interpretowanego jako logiczne „0” to około 1 V.
Na płytce zostały umieszczone dwa wieloobrotowe potencjometry montażowe, które służą zawężeniu dostępnego zakresu regulacji. Ich położenie jest odczytywane przy użyciu wbudowanego w mikrokontroler 12-to bitowego przetwornika ADC. Napięcie wchodzące na przetwornik podlega odfiltrowaniu z zakłóceń przy użyciu prostego układu RC. Jego zadaniem jest również zawężenie pasma dla szumu, przez co ustalona wartość nie fluktuuje.
Wyjście przetwornika cyfrowo-analogowego posiada znaczącą impedancję. Z tego powodu, przed filtrem regeneracyjnym trzeba wstawić wtórnik napięciowy, który ją zmniejszy. Najprostszym rozwiązaniem jest zastosowanie wzmacniacza operacyjnego typu LM358, gdyż jego parametry są całkowicie do tego wystarczające.