
- pomiar czńôstotliwoŇõci w¬†zakresie 1¬†Hz‚Ķ9,999999¬†MHz,
- regulowany czas akwizycji impulsów: 500 ms, 1 s, 2 s, 5 s, 10 s, 20 s,
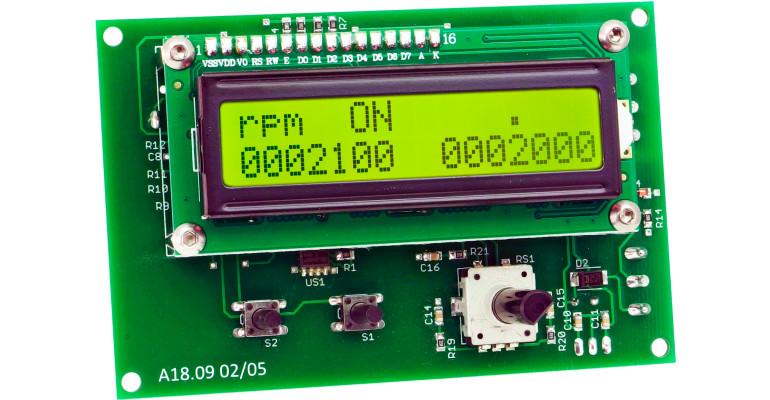
- wyŇõwietlanie wyniku pomiaru w¬†hercach [Hz] lub przeliczenie go¬†na¬†obroty na¬†minutńô [rpm],
- wartoŇõńá progowa zadawana impulsatorem,
- wyjŇõcie: styki NO+NC przekaŇļnika,
- zapamińôtywanie nastaw po¬†wyŇāńÖczeniu zasilania,
- wyŇõwietlacz LCD alfanumeryczny 2√ó16¬†znak√≥w,
- zasilanie 12 V DC.
Istnieje wiele rozwińÖzaŇĄ umoŇľliwiajńÖcych automatycznńÖ sygnalizacjńô osińÖgnińôcia zadanej wartoŇõci przez okreŇõlony parametr. Najprostszym przykŇāadem jest termostat, kt√≥rego wyjŇõcie steruje grzaŇākńÖ lub chŇāodziarkńÖ, tworzńÖc w ten spos√≥b zamknińôty ukŇāad objńôty ujemnym sprzńôŇľeniem zwrotnym. Do monitorowania wartoŇõci napińôcia moŇľna wykorzystańá jeden z wielu dostńôpnych komparator√≥w.
Jednak co w sytuacji, gdy ‚Äěpilnowana‚ÄĚ musi byńá czńôstotliwoŇõńá, np. napińôcia uzyskiwanego z elektrowni wiatrowej lub generatora spalinowego? MoŇľna zrobińá to poŇõrednio, posŇāugujńÖc sińô konwerterem czńôstotliwoŇõńá-napińôcie, lecz takie rozwińÖzanie bńôdzie znacznie mniej dokŇāadne od opisanego.
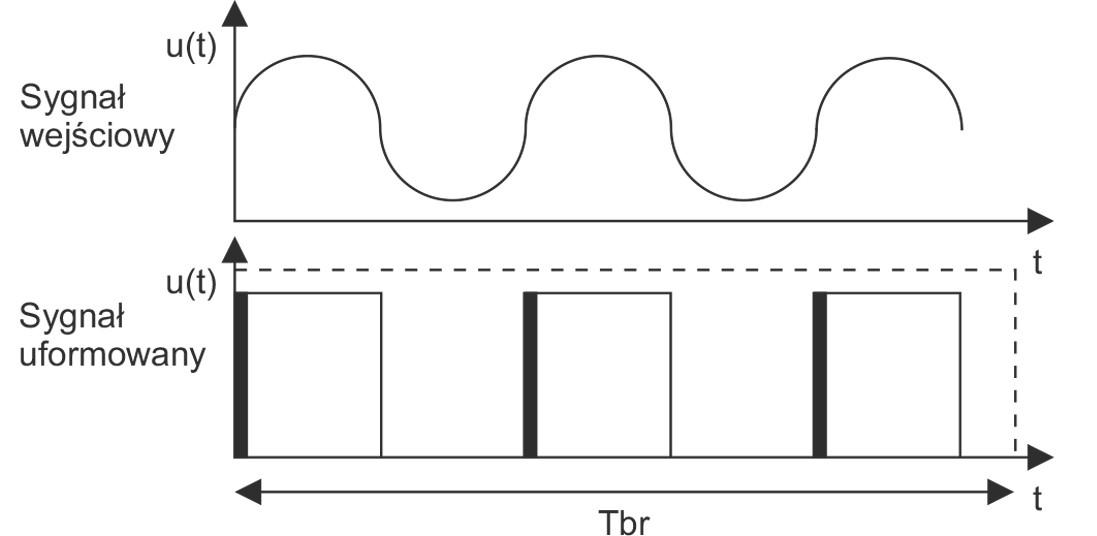
Pomiar czńôstotliwoŇõci realizowany przez ukŇāad odbywa sińô metodńÖ bezpoŇõrednińÖ. Uformowane impulsy, tworzone na podstawie sygnaŇāu wejŇõciowego, sńÖ zliczane przez zadany odcinek czasu. Jest to tzw. czas bramkowania. Im dŇāuŇľej trwa, tym lepiej moŇľna uŇõrednińá chwilowe fluktuacje czńôstotliwoŇõci, kt√≥re istniejńÖ w rzeczywistych urzńÖdzeniach, np. w silnikach spalinowych.
Budowa i dziaŇāanie
Najprostszym przykŇāadem uformowania sygnaŇāu wejŇõciowego jest przeksztaŇācenie go na przebieg prostokńÖtny, np. przerzutnikiem Schmitta. UkŇāad cyfrowy, sŇāuŇľńÖcy do zliczania, bńôdzie reagowaŇā tylko na jego zbocza ‚Äď narastajńÖce lub opadajńÖce. TakńÖ ideńô prezentuje rysunek 1, gdzie zaznaczono zbocza narastajńÖce uformowanego sygnaŇāu.
Elementem, kt√≥ry zarzńÖdza pracńÖ caŇāego urzńÖdzenia, jest mikrokontroler typu STM32F051 ‚Äď US6. Ma wystarczajńÖcńÖ liczbńô wyprowadzeŇĄ oraz, co bardzo waŇľne w tej aplikacji, jeden 32-bitowy licznik. Jego zadaniem nadrzńôdnym bńôdzie pomiar czńôstotliwoŇõci, zatem wymaga stabilnego wzorca czasu. Odpowiada za to rezonator kwarcowy Q1. Kondensatory C21 i C22 uŇāatwiajńÖ wzbudzenie drgaŇĄ, zaŇõ rezystor R22 zapobiega powstaniu oscylacji na czńôstotliwoŇõci harmonicznej.
Wbudowana w mikrokontroler pńôtla PLL powiela uzyskany sygnaŇā zegarowy do czńôstotliwoŇõci 48 MHz. Bńôdzie on obarczony pewnymi fluktuacjami fazy, wynikajńÖcymi z samej zasady dziaŇāania PLL, lecz przy dŇāugim czasie akwizycji impuls√≥w wejŇõciowych ‚Äď rzńôdu setek milisekund i wińôcej, wpŇāyw zjawiska na wyniki pomiar√≥w bńôdzie pomijalny.