
- Napięcie zasilania: 10…15 V DC.
- Prąd zasilania (przekaźniki wyłączone/załączone): 10 mA/100 mA.
- Zakres regulacji temperatury: 10…30°C.
- Skok regulacji: 1°C.
- Histereza regulacji: +1,5°C dla trybu schładzania, -1,5°C dla trybu ogrzewania.
- Dokładność pomiaru temperatury: 0,5°C.
- Zakres pomiarowy temperatury: 0…99,5°C.
- Zakres pomiarowy prędkości: 0…255 km/godz.
- Zakres pomiarowy chwilowego zużycia paliwa: 0…99,9 l/100 km.
- Zakres pomiarowy średniego zużycia paliwa: 0…25,5 l/100 km.
- Zakres pomiarowy zużytego paliwa: 0…999,9 l.
- Zakres pomiarowy przejechanego dystansu: 0…9999 km.
- Zakresy regulacji parametrów konfiguracyjnych:
- Stała wtryskiwacza: 1…999 ml/min.
- Stała przetwornika drogi: 1…99 imp/obr.
- Obwód opony: 1…255 cm.
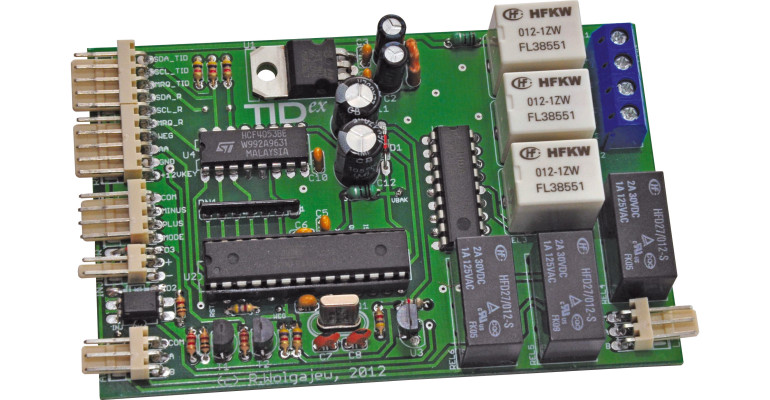
Jeszcze do niedawna producenci pojazdów traktowali po macoszemu polski rynek motoryzacyjny nie rozpieszczając potencjalnych nabywców bogatym wyposażeniem standardowym aut, a w zamian za to rozbudowując czasami niemal do granic absurdu listę wyposażenia opcjonalnego, za które należało oczywiście dopłacić. Na szczęście powoli zmierzamy ku Europie – jeśli nie liczyć tego „drobnego” faktu, iż od dawna stanowimy jej integralną część – i nowe modele pojazdów jeżdżące po naszych drogach coraz częściej nie odbiegają od tych sprzedawanych za naszą zachodnią granicą lub różnią się tylko nieznacznie. Niestety, nadal nie każdego stać na bogate wyposażenie, które niejednokrotnie podnosi komfort prowadzenia czy podróżowania, co powoduje, że tematyka motoryzacyjna dość często gości na łamach czasopism dla elektroników, a materializuje się tam w postaci różnych urządzeń elektronicznych poprawiających komfort użytkowania auta. Jednym z takich projektów był prezentowany przeze mnie w 2008 roku na łamach Elektroniki Praktycznej projekt TID – sterownik będący prostym systemem automatyki, współpracującym z oryginalnymi wyświetlaczami pokładowymi typu TID montowanymi w pojazdach marki Opel. Był on jednak pewnym kompromisem pomiędzy prostotą implementacji a zastosowanym sposobem współpracy z wyświetlaczem pokładowym, co powodowało pewne problemy komunikacyjne z wybranymi egzemplarzami wyświetlaczy pokładowych typu TID. Czas więc na rozwiązanie tego problemu oraz zbudowanie kompleksowego systemu typu „komputer pokładowy”, współpracującego z wyświetlaczami montowanymi seryjnie w pojazdach marki Opel.
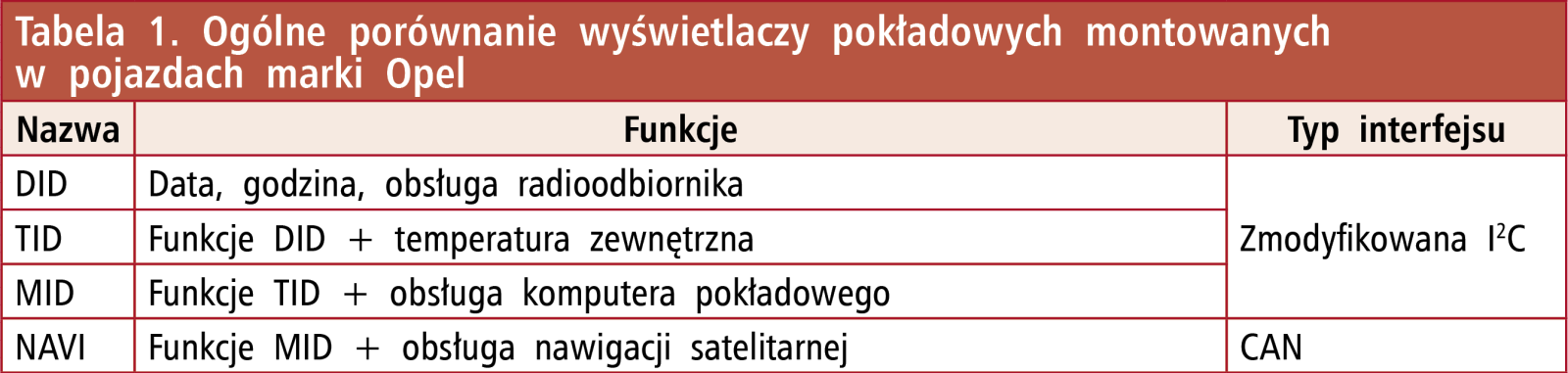
Zanim jednak przejdę do schematu samego sterownika warto przypomnieć kilka ważnych informacji dotyczących wyświetlaczy instalowanych seryjnie w Oplach. Firma Opel od wielu lat stosuje zewnętrzne, zintegrowane z deską rozdzielczą, podświetlane wyświetlacze LCD, których funkcje zależne są od modelu pojazdu, jego wyposażenia, roku produkcji oraz modelu wyświetlacza. Ogólnie rzecz ujmując można wyróżnić kilka typów wyświetlaczy, których ogólne porównanie umieszczono w tabeli 1.
Poza tymi podstawowymi różnicami, w zależności od roku produkcji pojazdu, stosowano różną organizację wyświetlaczy. Starsze pracowały miały obszar o rozdzielczości 1×8 znaków (w tym tylko wielkie litery) dostępny dla radioodbiornika, a co za tym idzie – dla urządzeń zewnętrznych, plus dodatkowe piktogramy obrazujące tryb pracy radioodbiornika. Nowsze wyświetlacze mają obszar 1×10 znaków (ASCII, znak 5×7 pikseli) plus piktogramy w dolnym wierszu, a górny wiersz zarezerwowano dla wbudowanego systemu mikroprocesorowego (zegar, termometr). Dodatkowo, przewidziano możliwość synchronizacji wbudowanego zegara czasu rzeczywistego sygnałem RDS z radioodbiornika. Możliwość implementacji komplikuje nieco fakt stosowania różnych typów złącz wyświetlaczy, lecz dla naszego sterownika ma to mniejsze znaczenie, gdyż jest on dołączany do złącza radioodbiornika, które miało jedynie 2 układy wyprowadzeń (nie licząc najnowszego z sygnałami magistrali CAN).