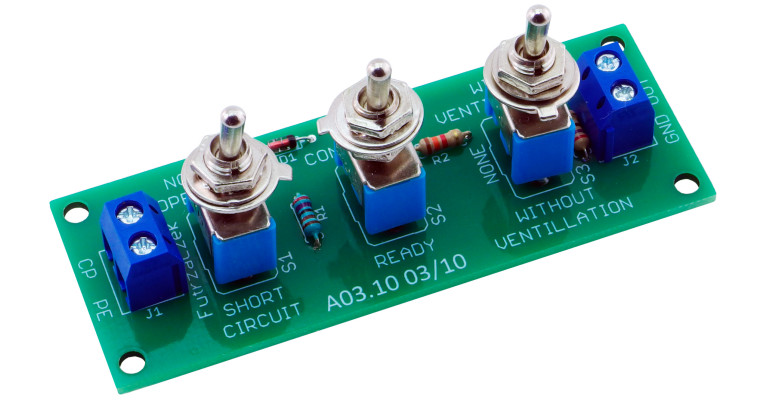

- obciążanie linii CP (Control Pilot) wychodzącej ze stacji ładującej do samochodów elektrycznych,
- możliwość wymuszania charakterystycznych dla tej linii stanów (A…E),
- zgodność z normą IEC 61851-1,
- prosta obsługa przy użyciu przełączników.
Auto elektryczne, po podłączeniu do odpowiedniej ładowarki, rozpoczyna z nią prosty, acz treściwy dialog. Ładowarka wytwarza sygnał PWM o częstotliwości 1 kHz i wartości maksymalnej wynoszącej +12 V oraz minimalnej równej –12 V. Źródło tego sygnału ma rezystancję wyjściową wynoszącą 1 kΩ. Po drugiej stronie kabla, w aucie, wbudowany jest prosty układ rezystorowy, który obciąża tę linię w określony sposób, kiedy samochód znajduje się w odpowiednim stanie ładowania. Na tej podstawie ładowarka może wiedzieć, co się z samochodem dzieje, jednocześnie zadając prąd do ładowania o określonym natężeniu – przy pomocy sygnału PWM. Tyle mówi norma IEC 61851-1, która precyzuje zasady dotyczące tej komunikacji. A dokładniej – trzeci tryb, bowiem norma definiuje cztery różne metody. Ten opisany jest najpowszechniej spotykany. W nim ładowanie odbywa się prądem przemiennym, z kontrolą prądu ładowania po stronie ładowarki.
Zaprezentowany prosty układ realizuje tę część systemu, która jest wbudowana w samochód elektryczny. Na potrzeby przeprowadzenia testów urządzenia ładującego – czy to naprawianego, czy będącego w fazie prototypu – możemy wymuszać przełącznikami określone stany pracy, po czym oscyloskopem podglądać przebieg czasowy napięcia na tej linii. To znacznie prostsze (i zarazem bezpieczniejsze) niż podłączanie potencjalnie niedziałającego urządzenia do samochodu elektrycznego, który też nie musi być podręcznym elementem wyposażenia pracowni elektronika.