



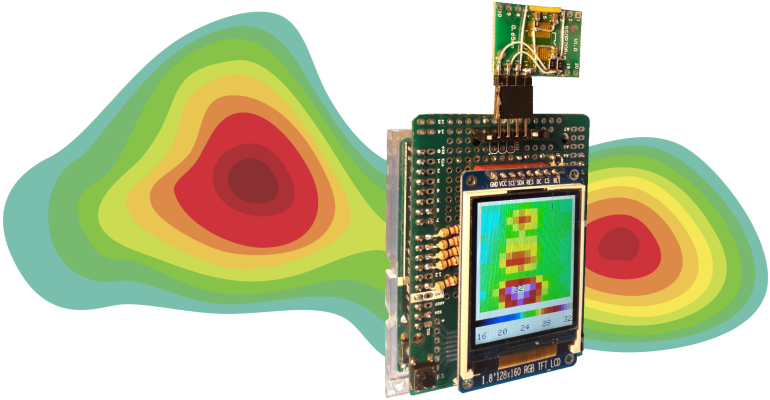

Dociekliwy inżynier elektronik może zadać pytanie: czy i jak można samodzielnie zbudować kamerę termowizyjną? Odpowiedź brzmi: „owszem – o ile użyjemy odpowiednich elementów”. Czujnikiem termowizyjnym najlepiej nadającym się do tego celu jest AMG88xx „Grid-EYE” firmy Panasonic. Ma wewnętrzne przetwarzanie sygnału, które całkowicie przejmuje obliczanie temperatur 64 punktów pomiarowych. Zmniejsza to znacznie obciążenie komputera zewnętrznego. Dlatego do zbudowania prostej kamery termowizyjnej w zupełności wystarczy Arduino UNO z ekranem TFT 1,8”.
Czujnik podczerwieni
Czujnik AMG88xx [1] to „chip” umieszczony na ceramicznym nośniku i wykonany w technologii MEMS z 64 punktami pomiarowymi (pikselami) czułymi na podczerwień. Piksele tworzą kwadratową matrycę. W czujniku znajduje się też układ ASIC ze wspomnianą elektroniką przetwarzającą oraz termistorem do pomiaru temperatury odniesienia. Ceramiczny nośnik jest pokryty metalową pokrywą, w której osadzona jest soczewka z krzemu, przepuszczająca promieniowanie w zakresie długości fal 5...12 µm.
Przez obiektyw na polu czujnika obrazowany jest obiekt. Można to sobie wyobrazić tak, jakby na każdym pikselu umieszczony był wierzchołek piramidy o kwadratowej podstawie i odbierał tylko promieniowanie skierowane do wewnątrz tej piramidy. W ten sposób wykrywane są łącznie 64 fragmenty obiektu – ułożone w kwadrat, co wynika z rozmieszczenia piramid.
Rysunek przedstawia uproszczoną i wyidealizowaną reprezentację matrycy z 4×4 punktami pomiarowymi. Pole widzenia (Field Of View) to obszar widoczny dla matrycy, który jest określony wyłącznie przez pionowe i poziome kąty przysłony.
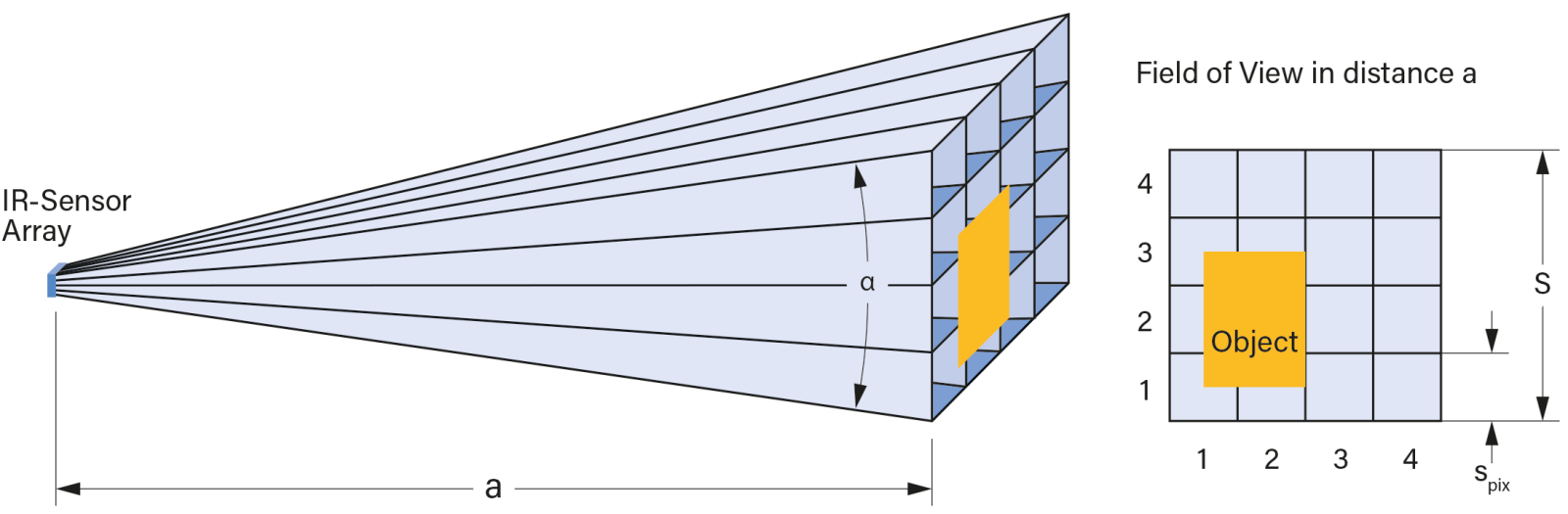
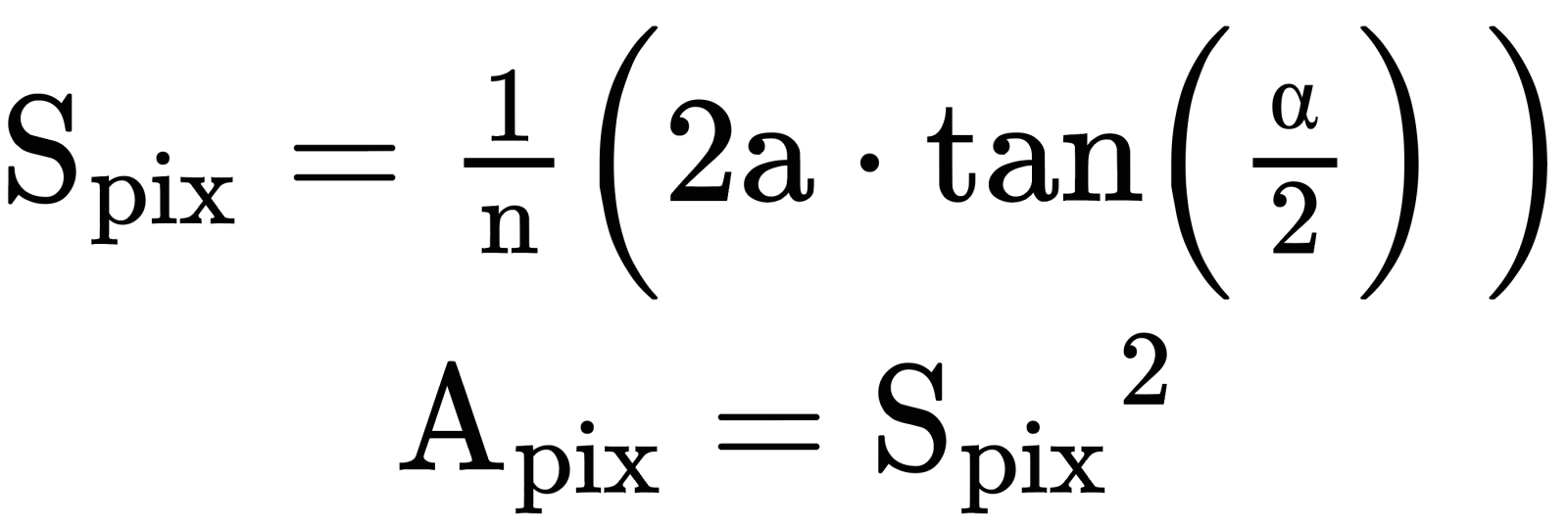
Ponieważ matryca jest kwadratem, kąty są sobie równe i oznaczone jako α. Dla każdej odległości obiektu a, w polu widzenia znajduje się widoczna powierzchnia o długości krawędzi S. Powierzchnia ta z kolei składa się z 16 indywidualnych powierzchni o długości krawędzi spix, z których każda jest przypisana do określonego piksela. Temperatura obiektu jest mierzona dokładnie tylko wtedy, gdy obiekt całkowicie pokrywa co najmniej jeden obszar częściowy. Wymóg ten można wykorzystać do obliczenia najmniejszego wykrywalnego rozmiaru obiektu dla określonej odległości a. W przypadku kwadratowej matrycy o wymiarach n×n pikseli obowiązuje następująca zasada:
Na rysunku powyżej tylko piksel o współrzędnych (2,2) spełnia ten wymóg. Piksele dla obszarów pola widzenia o współrzędnych (2,1), (1,2) i (2,3) są pokryte tylko w połowie. Zmierzona temperatura tych pikseli wyniesie zatem tylko połowę tej zmierzonej dla obszaru (2,2).
Mówiąc prościej: oznacza to, że wraz ze wzrostem odległości obiekty muszą być coraz większe – dostatecznie duże, aby obszar rzutowany na piksel został w pełni uchwycony. Ta zależność musi być zawsze brana pod uwagę, aby uniknąć nieprawidłowych pomiarów i interpretacji.
Dokładność pomiaru zależy również od emisyjności ε obiektu. Wynika ona ze składu powierzchni i określa zdolność do emitowania promieniowania cieplnego. W wewnętrznych obliczeniach temperatury czujnik Grid-EYE przyjmuje stałą emisyjność na poziomie 0,93.





















