
Niniejszy artykuł opisuje siłownik liniowy z kontrolą położenia z wykorzystaniem własnego mechanizmu, korpusu, kodu i układu elektronicznego. Po połączeniu wszystkich tych elementów, produkt końcowy będzie gotowy.
Projekt mechanizmu
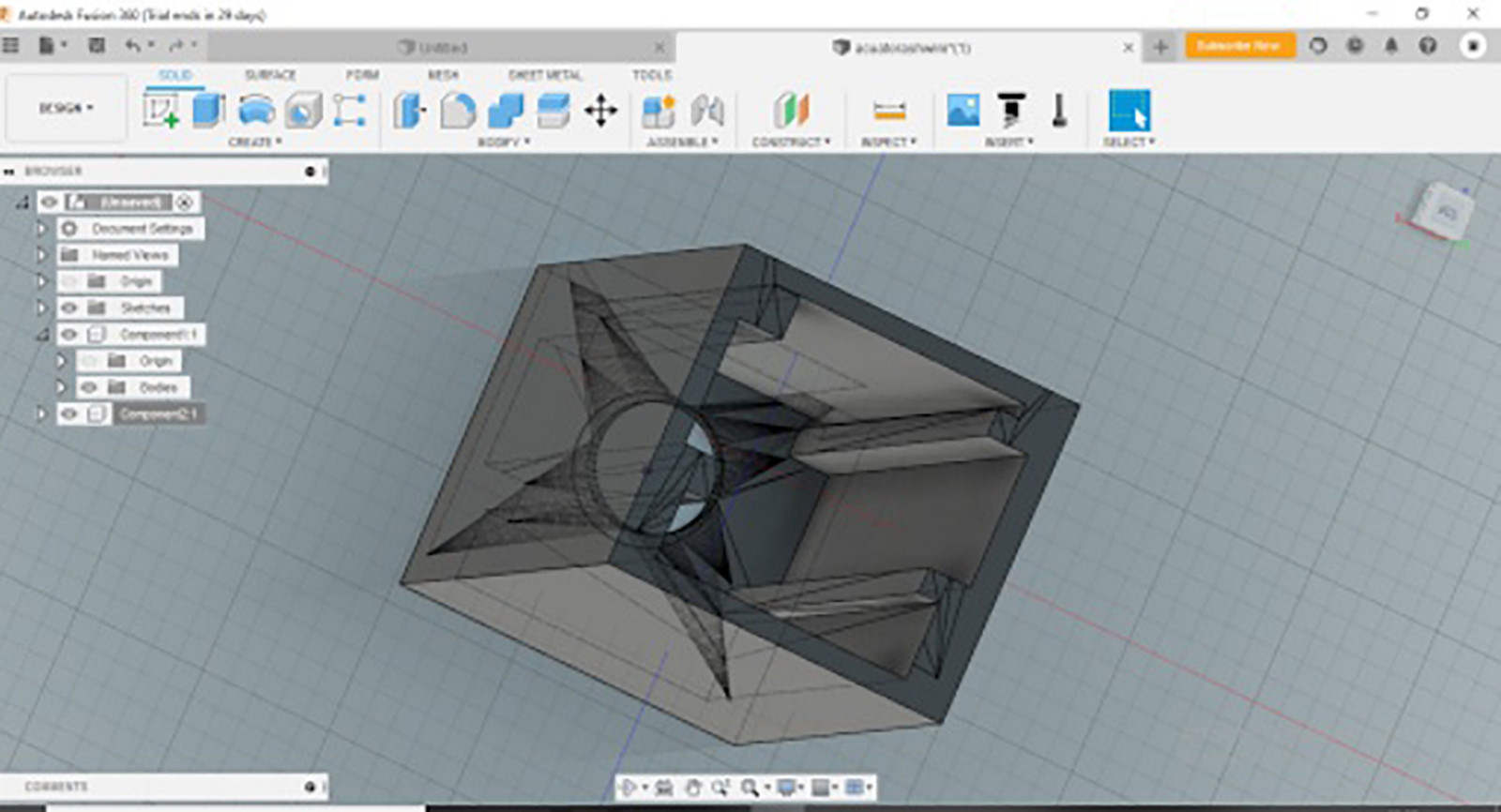
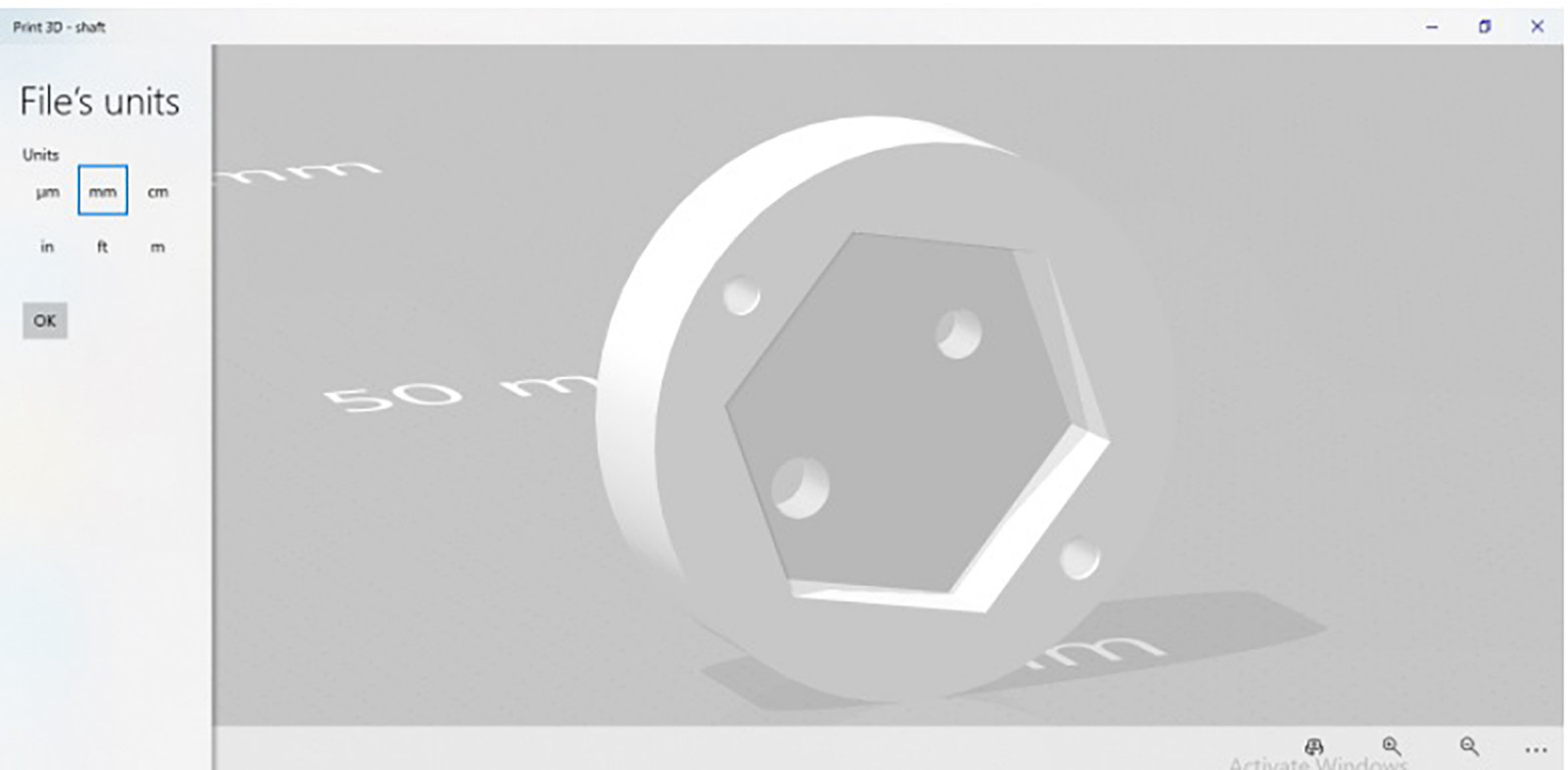
W pierwszej kolejności należy zaprojektować wałek oraz tłok/pręt siłownika dla siłownika liniowego sterowanego położeniem. Ponieważ wymagane części mechaniczne zostały już utworzone (przy użyciu Fusion 360), nie ma potrzeby ponownego ich projektowania. Jeśli chcesz, możesz wybrać dowolne inne oprogramowanie CAD, takie jak DesignSpark lub Tinkercad.
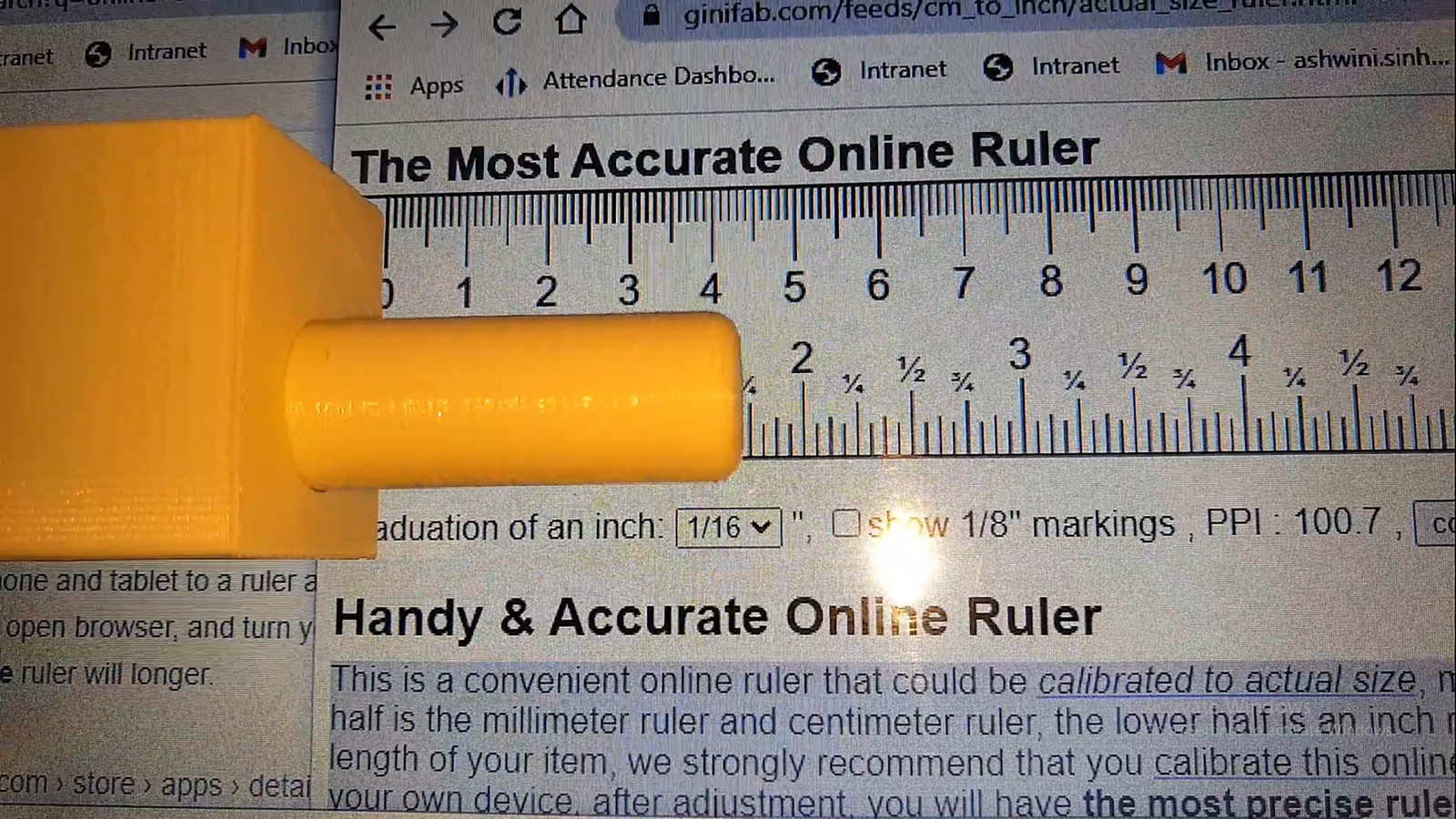
W siłowniku należy zastosować śruby ołowiane o długości 15 cm i skoku co 2 mm. Zmierz szerokość i wysokość śrub ołowianych oraz ich nakrętek. Następnie zaprojektuj części zgodnie z wymiarami.
Jeśli jesteś studentem elektroniki/mechatroniki/elektromechaniki lub chcesz się nauczyć projektowania komponentów, możesz przejrzeć pliki .stl i .f3d dołączone do artykułu. W przeciwnym razie możesz je pominąć i bezpośrednio uzyskać części drukowane 3D z tymi samymi wymiarami śruby wiodącej i nakrętki oraz innych części w zestawieniu materiałów.
Zespół mechanizmu
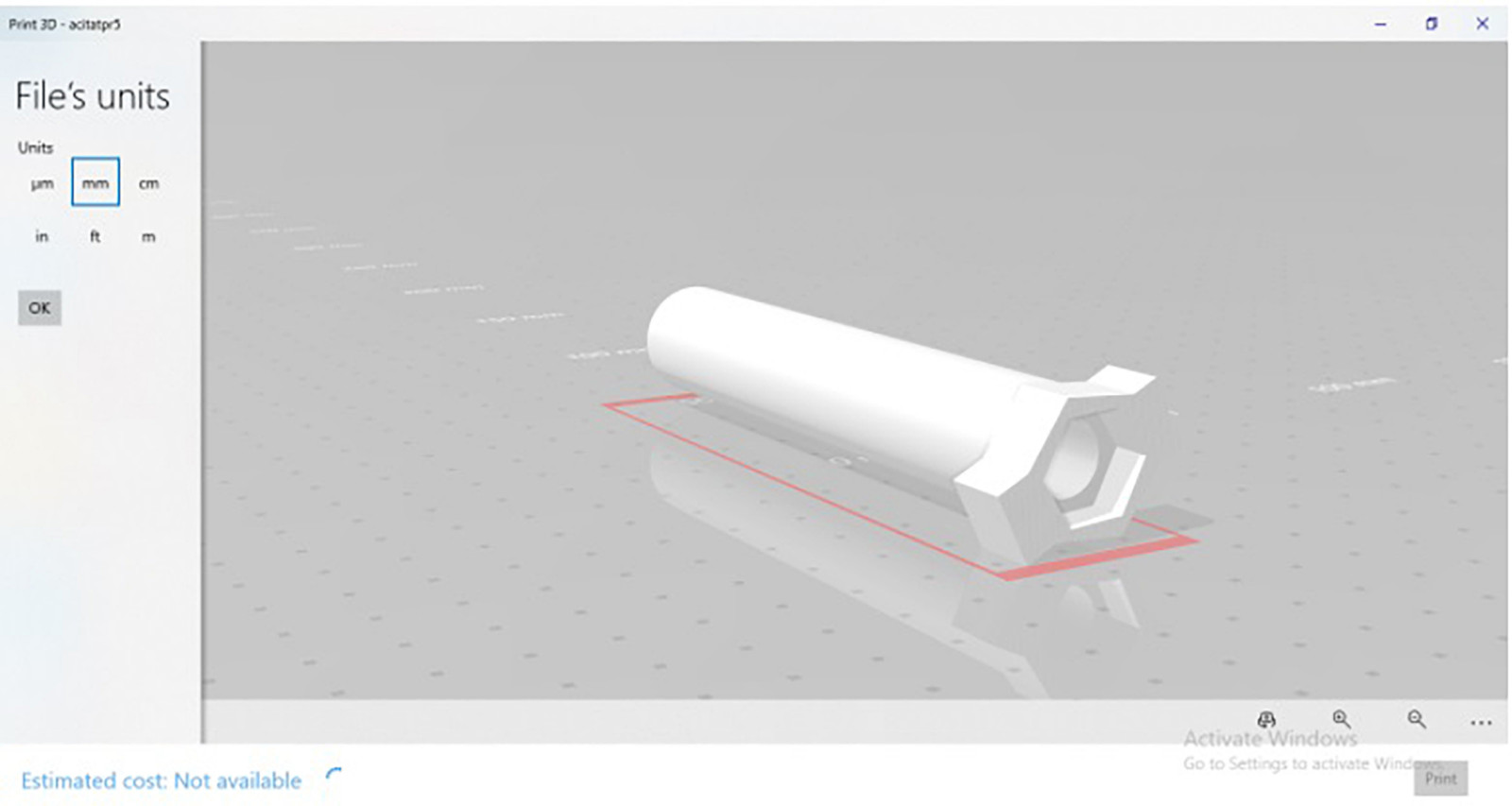
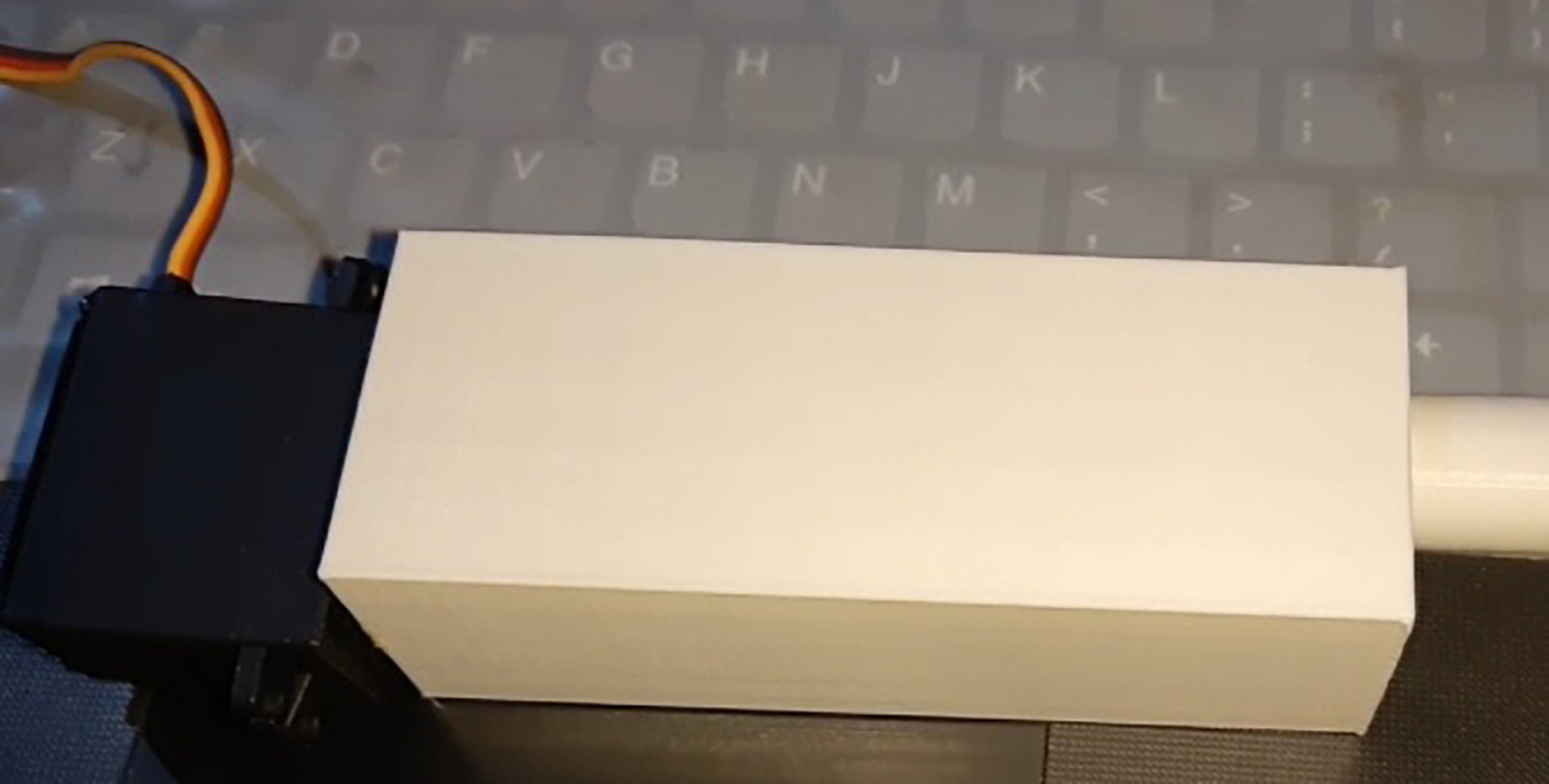
Po otrzymaniu wszystkich wydrukowanych w 3D części i innych elementów elektronicznych, zmontujmy teraz siłownik. Po pierwsze, umieść główkę śruby ołowianej w niewielkich rozmiarów, wydrukowanym w 3D łączniku wału (patrz fotografia 4). Po drugie, nałóż śrubę na wydrukowaną w 3D ruchomą część siłownika o długości 15 cm (patrz fotografia 5). Po trzecie, umieść śrubę prowadzącą wewnątrz części siłownika, obracając ją zgodnie z ruchem wskazówek zegara. Następnie umieść część ruchomą siłownika na wydrukowanym w 3D korpusie (patrz fotografia 6).




Na koniec przymocuj serwomechanizm do wałka siłownika liniowego za pomocą kleju i śruby. Następnie zamocuj serwomechanizm na korpusie siłownika za pomocą śruby i kleju.
Kodowanie
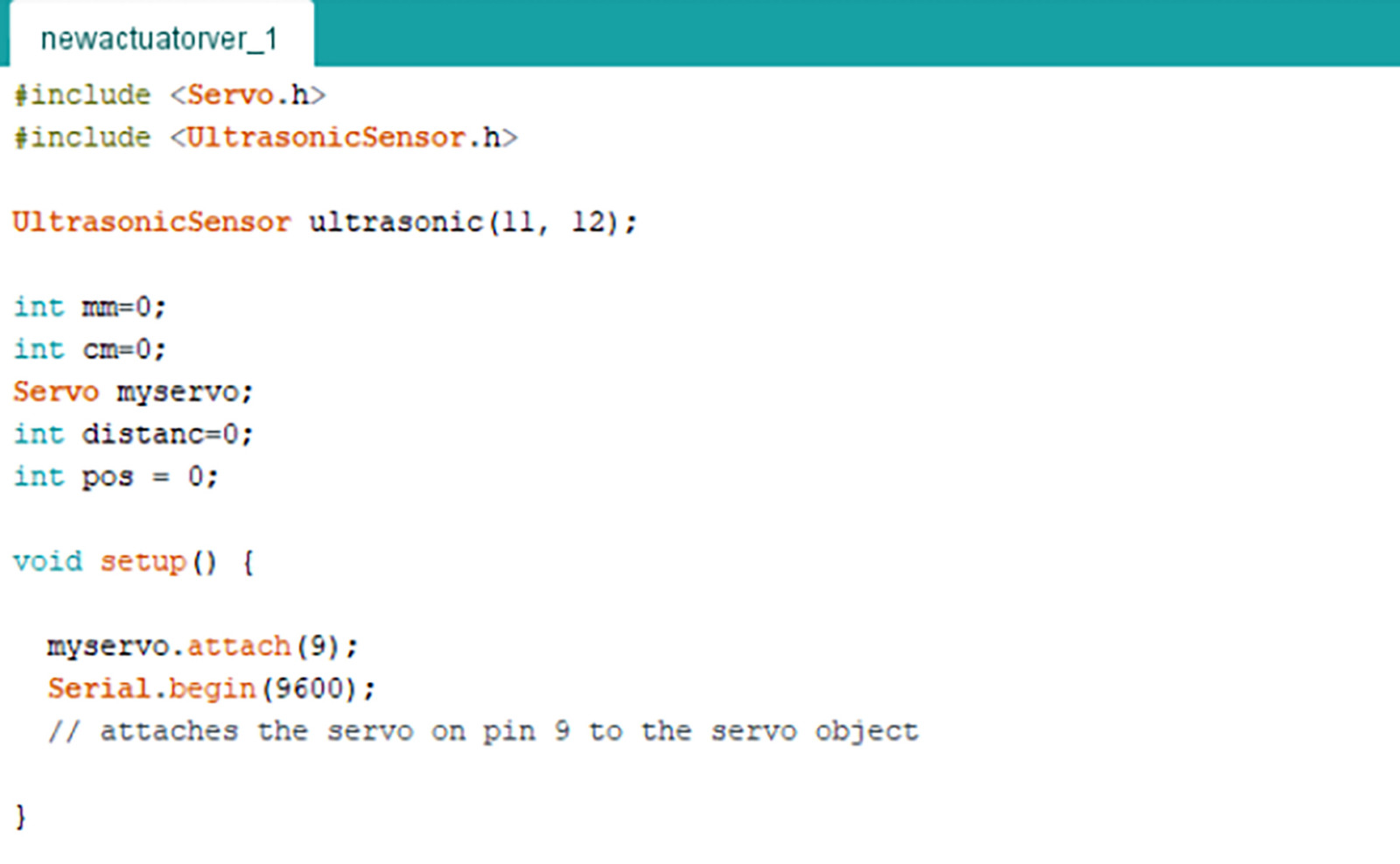
Rozpocznij od zainstalowania biblioteki czujnika ultradźwiękowego. W tym celu otwórz Library Manager znajdujący się w Tools. Wyszukaj nazwę biblioteki i zainstaluj ją.
W kodzie utwórz zmienną, która będzie przechowywała wartość aktualnej pozycji.
Następnie zdefiniuj pin dla czujnika i utwórz funkcję setup(), która ustawi szybkość transmisji komunikacji szeregowej z Arduino. Pozwoli to na uzyskanie aktualnej pozycji siłownika, a następnie wysłanie polecenia przesunięcia siłownika do żądanej pozycji.

Następnie utwórz funkcję loop(), przez którą będzie można regularnie uzyskiwać z czujnika aktualną pozycję siłownika (w mm). Dodaj również warunek if(), aby sprawdzić wartości aktualnych i pożądanych pozycji. Jeśli wartość pozycji pożądanej jest większa niż wartość pozycji bieżącej, to serwomechanizm powinien poruszać się zgodnie z ruchem wskazówek zegara, aż siłownik osiągnie pozycję pożądaną. Jeśli natomiast wartość ta jest mniejsza, to serwomechanizm powinien poruszać się w kierunku przeciwnym do ruchu wskazówek zegara, aż aktualna pozycja siłownika będzie zgodna z pozycją pożądaną.
Połączenie
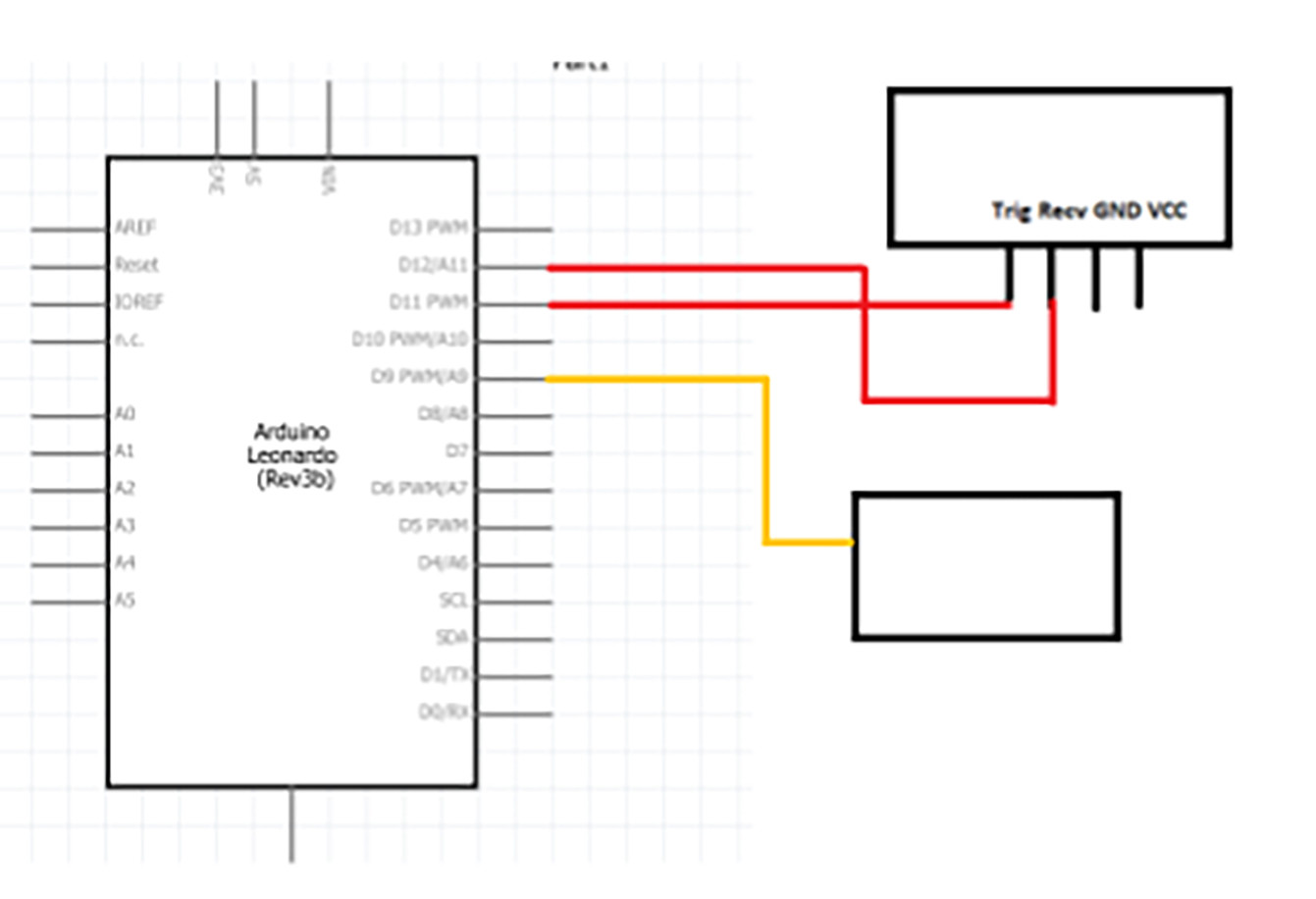
Wykonaj następujące połączenia:
- Serwomechanizm do baterii 5-9 V
- Pin sygnałowy (żółty) do pinu 9 w Arduino
- Czujnik TRIG do pinu 11 w Arduino
- REC do pinu 12 Arduino
Zasil czujnik za pomocą pinu VCC w Arduino. Połącz pin GND na Arduino z pinem GND czujnika.
Testowanie
Po podłączeniu zarówno baterii jak i serwomechanizmu, podłącz Arduino do komputera. Otwórz Serial Monitor i wprowadź wartość odległości (w mm), na jaką ma się poruszać siłownik.