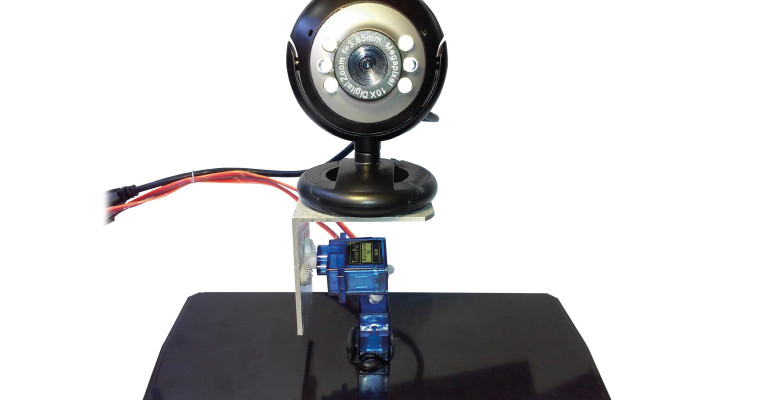

Część mechaniczną wykonano z dwóch serwomechanizmów połączonych ze sobą (sklejonych). Jeden odpowiada za ruch w płaszczyźnie poziomej, drugi w płaszczyźnie pionowej. W trakcie sklejania należy zwrócić uwagę czy serwomechanizmy mogą swobodnie poruszać się w całym zakresie, czy nie są blokowane przez pozostałe elementy mechaniczne oraz czy są równo ustawione. Do serwomechnizmów należy dołączyć duży, płaski element, który będzie pełnił rolę podstawki lub elementu mocującego oraz np. metalowy kątownik, na którym zostanie zamocowana sama kamera.
Serwomechanizm
Serwomechanizm to silnik z przekładnią i układem sterującym skonfigurowanymi w taki sposób, aby umożliwić ruch osi w pewnym zakresie, najczęściej 180 stopni. Serwomechanizm jest kontrolowany za pomocą przebiegu impulsowego o ściśle określonych parametrach. Położenie osi jest proporcjonalne do czasu trwania impulsu sterującego.
Większość serwomechanizmów wymaga zasilania napięciem z zakresu 4,5…6 V. W stanie spoczynku pobiera niewielki prąd rzędu kilkudziesięciu miliamperów. W czasie przemieszczania się lub gdy ramie jest obciążone (nawet nie musi być w ruchu), silnik napędu może pobierać znaczny prąd, nawet kilka amperów. Dlatego bardzo ważne jest zapewnienie odpowiednio wydajnego zasilania, a najlepszym rozwiązaniem jest zastosowanie oddzielnego zasilacza specjalnie dla serwomechanizmu. W proponowanym rozwiązaniu zastosowano serwomechanizmy modelarskie klasy „micro”, a współpracująca kamera jest lekka, więc nie użyto odrębnego zasilacza. Całość należy jednak zasilać z zasilacza, a nie z portu USB, który może mieć zbyt małą wydajność prądową oraz dołączyć dodatkowy kondensator filtrujący zasilanie o dużej pojemności.
Panel sterujący
Jako panel sterujący zastosowano moduł AVT1618, który zawiera następujące elementy umożliwiające wygodną manipulację kamerą: joystick, dwa przyciski, dwie diody LED oraz wyprowadzone złącza dla serwomechanizmów.
Głównym elementem panelu sterującego manipulatora jest joystick analogowy, zbliżonych budową do stosowanych w padach do konsoli PS. Drążek joysticka jest sprzęgnięty z osiami dwóch potencjometrów umieszczonych prostopadle, a ruch drążka zmienia położenie suwaków tych potencjometrów. Jeśli do potencjometrów doprowadzimy zasilanie, to na wyjściach otrzymamy dwa napięcia, jedno odpowiadające położeniu na umownej osi x, a drugie na umownej osi y.
Kontroler
„Mózgiem” urządzenia jest płytka Arduino Uno. Ma ona tę zaletę, że kupiona u sprawdzonego dostawcy, na pewno działa i nie trzeba marnować czasu na jej uruchomienie.