



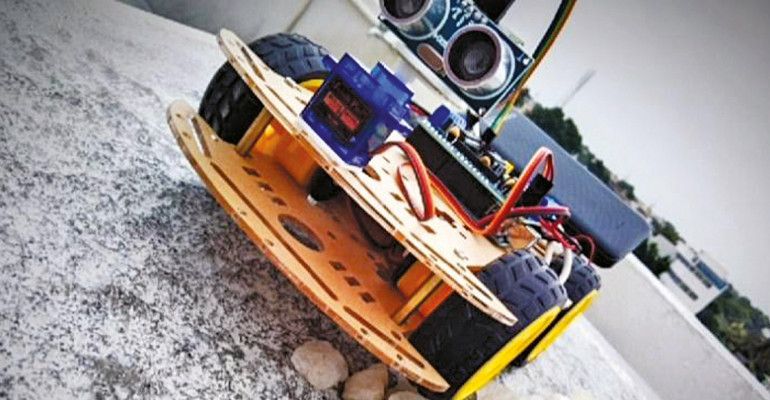

Prezentowany tu projekt robotu-samochodzika ma wbudowaną inteligencję spełniającą wyżej nakreślone wymagania. Algorytm działania wbudowany jest w software, którego pracą steruje obwód rozpoznawania przeszkody. Prototyp wykonany przez autora widzimy na fotografii powyżej. Aczkolwiek to zabawka, algorytm można przenieść dla robota wykonującego poważniejsze zadania. Robota potrafiącego poruszać się w nieznanym terenie bez ciągłego nadzoru i sterowania przez operatora.
Spis materiałów:
- Arduino UNO R3 – 1 szt.
- Płytka drivera silników – 1 szt.
- Koła – 4 szt.
- Silniki DC z wbudowanymi przekładniami – 4 szt.
- Servo-motor – 1 szt.
- Czujnik ultradźwiękowy – 1 szt.
- Stopka mocująca czujnik – 1 szt.
- Bateria LiPO – 1 szt.
- „Pokrywa” akrylowa – 1 szt.
- Przewody oraz jumpery męskie i żeńskie





















