




Zgodnie z nazwą, zadaniem zaprezentowanego mechanizmu jest sortowanie żetonów do pokera. Rozdzielane są one na cztery kategorie na podstawie odczytu z czujnika.
Jak to działa?
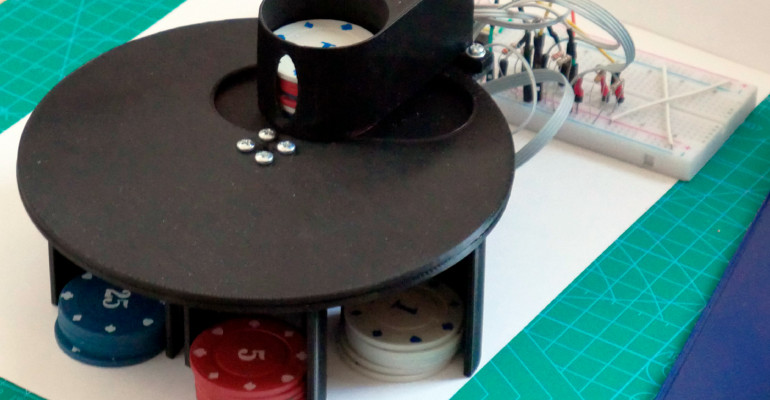
Sorter ma jeden ruchomy element: tarczę z wyciętym otworem. Jak widzimy otwór składa się z dwóch połączonych kół o średnicy żetonu. Pierwsze znajduje się bliżej, a drugie dalej od środka tarczy. Gdy tarcza obraca się zgodnie z ruchem wskazówek zegara, żeton będzie znajdował się w odległości r1 od środka tarczy. Gdy zmienimy kierunek obrotu, żeton przesunie się do drugiego koła i będzie się poruszał w odległości r2.
Nasza tarcza obraca się po stole, w którym w odległości r2 mamy cztery otwory. Podajnik żetonów umieszcza pojedynczy krążek w bliższym otworze (r1). Teraz następuje ruch tarczy, który przesuwa żeton w odległości r1, a więc nie spadnie on ze stołu. Po przesunięciu za dziurę, do której powinien spaść, następuje zmiana kierunku obrotu tarczy. Żeton przesuwa się do drugiego otworu na odległość r2 i rozpoczyna powrót. Jednak tym razem napotka otwór w stole, przez który spadnie.
Tarcza, już bez żetonu, wraca do pozycji startowej pod podajnik. Jest to ostatni element, któremu się przyjrzymy. Aby za każdym razem był zabierany dokładnie jeden żeton, tarcza musi być cieńsza niż grubość żetonu. Zadaniem podajnika jest zatrzymanie żetonów stojących na nim. W tym celu musi się on zaczynać nie wyżej niż grubość dwóch żetonów, ale wyżej niż grubość pojedynczego.
W stole, pod podajnikiem umieszczony jest czujnik CNY70, którego zadaniem jest rozróżnienie żetonów. Jako napęd zastosowałem silnik prądu stałego. Musimy więc mieć czujniki wykrywające położenie tarczy. Użyte są tu dwa kolejne CNY70. Pierwszy wykrywa pozycję początkową, a drugi liczy, nad którym otworem obecnie znajduje się tarcza. Czujniki zamontowane są w stole w jednej linii z podajnikiem. Pierwszy otwór znajduje się 90° od podajnika, a pozostałe trzy są oddalone od siebie o 60°. Na wysokości czujnika startu znajduje się tylko jeden znacznik (1). Natomiast dla licznika otworów są ich cztery (2). Jak widzimy na schemacie, są one umieszczone w połowie odległości pomiędzy dziurami.
Do sterowania całością posłużył moduł Arduino Nano. Diody nadawcze czujników CNY70 są podłączone do zasilania przez rezystory ograniczające prąd. Natomiast fototranzystory wraz z rezystorami 10 kΩ tworzą dzielniki napięcia. Są one podłączone bezpośrednio do wejść analogowo-cyfrowych mikrokontrolera. Silnik jest sterowany przez scalony mostek H oznaczony jako L293D. Użyty jest tylko jeden z dwóch mostków dostępnych w układzie. Niewykorzystane wejścia zostały podciągnięte do masy.



















